 您好, 欢迎来到化工仪器网
您好, 欢迎来到化工仪器网













| 应用领域 | 医疗卫生,生物产业,地矿,道路/轨道/船舶 |
|---|
产品简介
详细介绍
西门子6RA8096-4GV62-0AA0调速器
期望我此刻给您的报价,期望您对我的相信。让我们为以后的合作,为以后长远的合作共同努力!
我公司只销售西门子原装产品,享受西门子免费一年保修(部分产品可换新)
SIEMENS朔川电气(上海)有限公司(西门子*一级代理商)
莫工(销售部)


产品销售23个省、5个自治区、全国各大地区
朔川电气经营西门子*现货PLC;S7-200S7-300 S7-400 S7-1200 触摸屏,变频器,6FC,6SNS120 V10 V60 V80伺服数控备件:*电机(1LA7、1LG4、1LA9、1LE1),国产电机(1LG0,1LE0)大型电机(1LA8,1LA4,1PQ8)伺服电机(1PH,1PM,1FT,1FK,1FS)西门子保内*产品‘质保一年。一年内因产品质量问题免费更换新产品;不收取任何费。咨询。
1、 SIMATIC S7 系列PLC、S7200、s71200、S7300、S7400、ET200
西门子中国总公司 西门子中国总公司 西门子中国代理商有限公司

西门子PLC模块哪家代理商公司价格质量好 -用和实践经验以及雄厚的技术力量,尤其以 PLC复杂控制系统、传动技术应用、伺服控制系统、数控备品备件、人机界面及网络/软件应用为公司的技术特长,几年来,湖南咏靖公司在与德国 SIEMENS公司自动化与驱动部门的*紧密合作过程中,建立了良好的相互协作关系,在可编程控制器、交直流传动装置方面的业务逐年成倍增长,为广大用户提供了SIEMENS的新 技术及自动控制的优秀解决方案。

西门子正是前行路上能共担风雨的伙伴。从一颗葡萄到一滴美酒的美妙变迁能在西门子数字化平台上全程追溯。而在2016年汉诺威博览会上,也源自西门子的前沿数字技术。


西门子s7-300模块代理商
西门子s7-300模块代理商
上海朔川自动化设备SIEMENS/西门子中国总代理 1984年:西门子为中国建设了*条高压直流输电线 在PROFInet上实现基于组件的自动化中实现分布式智能系统随着计算机控制的发展因为心Plessey公司的持有人在访德期间参观了西门子在慕尼黑的总部!!正如创新工业知其道用奇妙!期望我此刻给您的报价,期望您对我的相信。让我们为以后的合作,为以后长远的合作共同努力!
SIEMENS上海朔川公司(西门子*一级代理商)
凡在本公司购买的产品,保证全新,假一罚十,可签订正式销售合同,本公司主要经营S7-200,S7-300,S7-1200,S7-400 PLC模块,触摸屏,通讯电缆,编程电缆,DP接头,LOGO,模快.SMART模块,软启动器,伺服电机,变频器等产品,西门子保内*产品‘质保一年。一年内因产品质量问题免费更换新产品;不收取任何费。
咨询
承诺:1、保证全新*:
2、保证安全准时发货:
3、保证售后服务质量
流程:1、客户确认所需采购产品型号:
2、我方会根据询价单型号查询价格以及交货期,拟一份详细正规报价单
3,客户收到报价单并确认型号无误后订购产品
4、报价单负责人根据客户提供型号以及数量拟份销售合同:
5、客户收到合同查阅同意后盖章回传并按照合同销售额汇款到公司账户
6、我公司财务查到款后,业务员安排发货并通知客户跟踪运单。
西门子6RA8096-4GV62-0AA0调速器
- 使用 CM 1241 RS232 通讯模块只能与一个从站通讯 ( 由于物理限制 ) 。
- 允许多与 10 个从站的相继地通讯使用 RS422 ( 使用 CM 1241 RS422/RS485)。
- 允许多与 32 个从站的相继地通讯使用 RS485 ( 使用 CM 或者 CB 1241 RS485 )。
使用示例项目来描述在 STEP 7 (TIA Portal) V14 中使用 CM 1241 RS422/485 与多个从站进行通信的配置步骤。
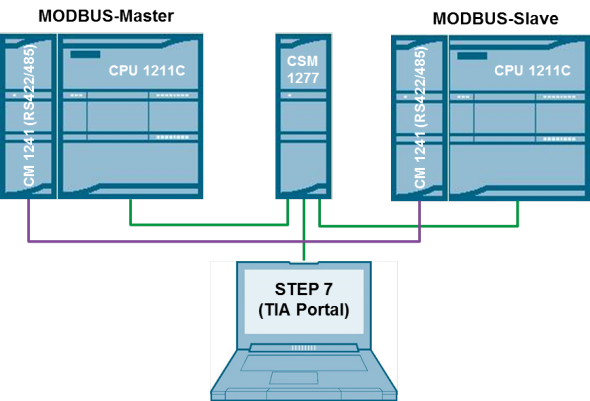
图. 01
S7-1200 CPU将微处理器、集成电源、输入和输出电路、内置 PROFINET、高速运动控制 I/O 以及板载模拟量输入组合到一个设计紧凑的外壳中来形成功能强大的控制器。S7-1200可以方便地执行速度控制、位置控制等基本运动控制功能,被广泛地应 用到各行各业的自动化解决方案中。
TIA Portal 结合 CPU S7-1200 的“运动控制”功能,可帮助用户实现通过脉冲接口控制步进电机和伺服电机:
● 在 TIA Portal 中,可以组态“轴”和“命令表”工艺对象。 CPU S7-1200 可以使用这些工艺对象控制用于控制驱动器的脉冲和方向输出。
● 在用户程序中,通过运动控制指令来控制轴,启动驱动器的运动任务。
解决方案
本文以CPU 1214C和V80为例,具体讲解了如何在TIA Portal下对S7 1200进行面向运动控制的组态、编程、调试等操作。 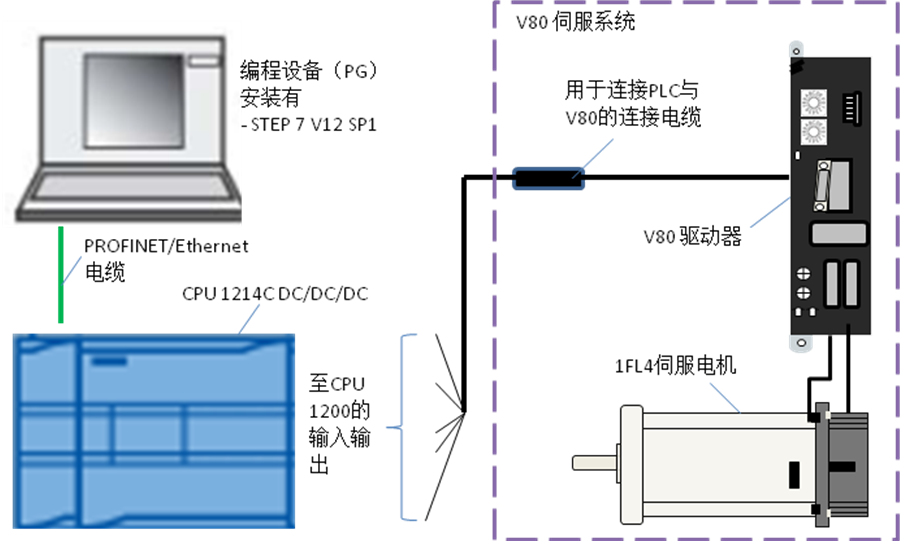
图01. CPU 1214C控制V80伺服电机实现运动控制功能
可以通过 TSEND_C 与 TRCV_C 指令,使用 S7-1200/1500 CPU 集成的 PROFINET 接口进行开放式以太网通讯,并做数据交换...
在STEP 7 (TIA Portal)中 ,可以在"Communication > Open User Communication" 面板下"Instructions"任务卡里,找到 TSEND_C 和 TRECV_C 指令。
| 指令 | Description |
|---|---|
| TSEND_C | 异步执行的 TSEND_C 指令有以下功能 :
|
| TRCV_C | 异步执行的 TRCV_C 指令有以下功能:
|
表 1
支持以下协议:
- ISO-on-TCP
- TCP
- UDP
示例程序说明
此S7程序包含调用 "TSEND_C" 和 "TRCV_C" 指令,及参数化并建立 S7-1200 CPU 和 S7-1500 的 ISO-on-TCP 连接。建立 ISO-on-TCP 连接的参数保存在 "General Data" 数据块里。
西门子S7-1200 紧凑型PLC在当前的市场中有着广泛的应用,作为经常与SINAMICS G120系列变频器共同使用的PLC,其USS通信协议的使用一直在市场上有着非常广泛的应用。本文将主要介绍如何使用USS通信协议来实现S7-1200与G120变频器的通信。
1.控制系统原理和接线图
下图是本例中所使用的原理和接线图。

图1:控制系统原理和接线图
2.硬件需求
S7-1200 PLC目前有3种类型的CPU:
1)S7-1211C CPU。
2)S7-1212C CPU。
3)S7-1214C CPU。
这三种类型的CPU都可以使用USS通信协议通过通信模块CM1241 RS485来实现S7-1200与G120变频器的通信。
本例中使用的PLC硬件为:
1)PM1207电源 ( 6EP1 332-1SH71 )
2) S7-1214C ( 6ES7 214 -1BE30 -0XB0 )
3) CM1241 RS485 ( 6ES7 241 -1CH30 -0XB0 )
4) 模拟器 ( 6ES7 274 -1XH30 -0XA0 )
本例中使用的G120变频器硬件为:
1) SINAMICS G120 PM240 (6SL3244-0BA20-1BA0)
2) SINAMICS G120 CU240S(6SL3224-0BE13-7UA0)
3) SIEMENS MOTOR (1LA7060-4AB10)
4) 操作面板 ( XAU221-001469)
5) USS 通信电缆 ( 6XV1830-0EH10)
3.软件需求
1) 编程软件 Step7 Basic V10.5 ( 6ES7 822-0AA0-0YA0)
4.组态
我们通过下述的实际操作来介绍如何在Step7 Basic V10.5 中组态S7-1214C 和G120变频器的USS通信。
4. 1 PLC 硬件组态
首先在Step7 Basic V10.5中建立一个项目,如图1所示。

图2: 新建S7 1200项目
在硬件配置中,添加CPU1214C和通信模块CM1241 RS485模块,如图2所示。

图3: S7 1200硬件配置
在CPU的属性中,设置以太网的IP地址,建立PG与PLC的连接,如下图所示。

图4: S7 1200 IP地址的设置
4. 2 G120参数设置
变频器的参数设置如下表所示。
| 序号 | 功能 | 参数 | 设定值 |
| 1 | 工厂设置复位 | P0010 | 30 |
| 2 | 工厂设置复位 | P970 | 1 |
| 3 | 快速启动设置 | P0010 | 1 |
| 4 | 电机额定电压 | P0304 | 380V |
| 5 | 电机额定功率 | P0307 | 5.5KW |
| 6 | 电机额定频率 | P0310 | 50Hz |
| 7 | 电机额定转速 | P0311 | 1350r/min |
| 8 | USS命令源 | P0700 | 5 |
| 9 | 频率设定源 | P01000 | 5 |
| 10 | 小电机频率 | P1080 | 0.0Hz |
| 11 | 大电机频率 | P1081 | 50.0Hz |
| 12 | 启动斜坡时间 | P1120 | 10.0S |
| 13 | 延迟斜坡时间 | P1121 | 10.0S |
| 14 | 结束快速启动设置 | P3900 | 1 |
| 15 | 激活专家模式 | P0003 | 3 |
| 16 | 参考频率 | P2000 | 50.0Hz |
| 17 | USS数据传输速度 | P2010 | 9 |
| 18 | USS从站地址 | P2011 | 1 |
| 19 | USS PZD长度 | P2012 | 2 |
| 20 | USS PKW长度 | P2013 | 4 |
| 21 | 通信监控 | P2014 | 0 |
| 22 | 在E2PROM 保存数据 | P0971 | 1 |
| 23 | 激活专家模式 | P0003 | 3 |
| 24 | 激活参数模式 | P0010 | 30 |
| 25 | 从G120中传输参数到BOP | P0802 | 1 |
表1 :G120变频器的参数设置
注意:表1中的17,18,19,20 这四项参数值的设置必须使PLC的参数值与变频器的参数值相一致。而19,20这两个参数值必须设置成如表1中的值,否则有可能变频器与S7-1200通信有如下问题:可能不能读出从变频器反馈回来的参数值。
5.USS通信原理与编程的实现
5. 1 S7 1200 PLC与G120 通过USS通信的基本原理
S7 1200提供了的USS库进行USS通信,如下图所示:

图5: S7 1200 的USS库
USS_DRV 功能块是S7-1200 USS通信的主体功能块,接受变频器的信息和控制变频器的指令都是通过这个功能快来完成的。必须在主 OB中调用,不能在循环中断OB中调用。
USS_PORT功能块是S7-1200与变频器USS通信的接口,主要设置通信的接口参数。可在主OB或中断OB中调用。
USS_RPM功能块是通过USS通信读取变频器的参数。必须在主 OB中调用,不能在循环中断OB中调用。
USS_WPM功能块是通过USS通信设置变频器的参数。必须在主 OB中调用,不能在循环中断OB中调用。
这些功能块与变频器之间的控制关系如下图所示:

图6: USS 通信功能块与变频器的控制关系
USS_DRV功能块通过USS_DRV_DB数据块实现与USS_PORT功能块的数据接收与传送,而USS_PORT功能块是S7-1200 PLC CM1241 RS485模块与变频器之间的通信接口。USS_RPM功能块和USS_WPM功能块与变频器的通信与USS_DRV功能块的通信方式是相同的。
每个S7-1200 CPU多可带3个通信模块,而每个CM1241 RS485通信模块多支持16个变频器。因此用户在一个S7-1200 CPU中多可建立3个USS网络,而每个USS网络多支持16个变频器,总共多支持48个USS变频器。
5. 2 S7 1200 PLC进行USS通信的编程
1.USS通信接口参数功能块的编程
USS通信接口参数功能块的编程如下图所示。

图7: USS通信接口参数功能块的编程
USS_PORT功能块用来处理USS网络上的通信,它是S71200 CPU与变频器的通信借口。每个CM1241 RS485模块有且必须有一个USS_PORT功能块。
PORT:指的是通过哪个通信模块进行USS通信。
BAUD:指的是和变频器进行通行的速率。 变频器的参数P2010种进行设置。
USS_DB:指的是和变频器通信时的USS数据块。每个通信模块多可以有16个USS数据块,每个CPU多可以有48个USS数据块,具体的通信情况要和现场实际情况相联系。每个变频器与S7-1200进行通信的数据块是 的。
ERROR:输出错误。
STATUS:扫描或初始化的状态。
S7-1200 PLC与变频器的通信是与它本身的扫描周期不同步的,在完成一次与变频器的通信事件之前,S7-1200通常完成了多个扫描。
USS_PORT通信的时间间隔是S7-1200与变频器通信所需要的时间,不同的通信波特率对应的不同的USS_PORT通信间隔时间。下图列出了不同的波特率对应的USS_PORT小通信间隔时间。

图8:不同的波特率对应的USS_PORT小通信间隔时间
USS_PORT在发生通信错误时,通常进行3次尝试来完成通信事件,那么S7-1200与变频器通信的时间就是USS_PORT发生通信超时的时间间隔。例如:如果通信波特率是57600,那么USS_PORT与变频器通信的时间间隔应当大于小的调用时间间隔,即大于36.1Ms而小于109Ms。S7-1200 USS 协议库默认的通信错误超时尝试次数是2次。
基于以上的USS_PORT通信时间的处理,我们建议在循环中断OB块中调用USS_PORT通信功能块。在建立循环中断OB块时,我们可以设置循环中断OB块的扫描时间,以满足通信的要求。循环中断OB块的扫描时间的设置如下图所示:

图9:循环中断OB块的扫描时间的设置
2.USS_DRV功能块的编程
USS_DRV功能块的编程如下图所示。

图10: USS_DRV功能块的编程
USS_DRV功能块用来与变频器进行交换数据,从而读取变频器的状态以及控制变频器的运行。每个变频器使用 一的一个USS_DRV功能块,但是同一个CM1241 RS485模块的USS网络的所有变频器(多16个)都使用同一个USS_DRV_DB。
USS_DRV_DB:变频器进行USS通信的数据块。
RUN: DB块的变频器启动指令。
OFF2: 紧急停止,自由停车。 该位为0时停车。
OFF3: 快速停车,带制动停车。 该位为0时停车。
F_ACK: 变频器故障确认。
DIR : 变频器控制电机的转向。
SPEED_SP: 变频器的速度设定值。
ERROR: 程序输出错误。
RUN_EN: 变频器运行状态指示。
D_DIR: 变频器运行方向状态指示。
INHIBIT: 变频器是否被禁止的状态指示。
FAULT: 变频器故障。
SPEED: 变频器的反馈的实际速度值。
DRIVE: 变频器的USS站地址。变频器参数P2011设置。
PZD_LEN: 变频器的循环过程字。 变频器参数P2012设置。
注意:变频器的PKW的长度在这里是特殊需要注意的,在使用USS通信时必须是4,如果改成3或者127都将不能读取反馈回来的过程值。
3.USS_RPM功能块的编程
USS_RPM功能块的编程 如下图所示。

图11:USS_RPM功能块的编程
USS_RPM功能块用于通过USS通信从变频器读取参数。
REQ: 读取参数请求。
DRIVE: 变频器的USS站地址。
PARAM: 变频器的参数代码。
INDEX: 变频器的参数索引代码
USS_DB: 变频器进行USS通信的数据块。
DONE: 读取参数完成。
ERROR: 读取参数错误。
STATUS: 读取参数状态代码。
VALUE: 所读取的参数的值。
注意:进行读取参数功能块编程时,各个数据的数据类型一定要正确对应。如果需要设置变量读取参数时,注意该参数变量的初始值不能为0,否则容易产生通信错误。
4.USS_WPM功能块的编程
USS_WPM功能块的编程如下图所示。

图12:USS_WPM功能块的编程
USS_WPM 功能块用于通过USS通信设置变频器的参数。
REQ: 读取参数请求。
DRIVE: 变频器的USS站地址。
PARAM: 变频器的参数代码。
INDEX: 变频器的参数索引代码。
EEPROM:把参数存储到变频器的EEPROM。
VALUE: 设置参数的值。
USS_DB: 变频器进行USS通信的数据块。
DONE: 读取参数完成。
ERROR: 读取参数错误状态。
STATUS: 读取参数状态代码。
注意:对写入参数功能块编程时,各个数据的数据类型一定要正确对应。如果需要设置变量进行写入参数值时,注意该参数变量的初始值不能为0,否则容易产生通信错误。
5. 3 S7 1200 PLC进行USS通信的调试
S7-1200 PLC 通过CM1241 RS485模块与变频器进行USS通信时,需要注意如下几点:
- 当同一个CM1241 RS485 模块带有多个(多16个)USS变频器时,这个时候通信的USS_DB是同一个,USS_DRV功能块调用多次,每个USS_DRV功能块调用时,相对应的USS站地址与实际的变频器要一致,而其它的控制参数也要一致。
- 当同一个S7-1200 PLC 带有多个CM1241 RS485模块(多3个)时,这个时候通信的USS_DB相对应的是3个,每个CM1241 RS485模块的USS网络使用相同的USS_DB,不同的USS网络使用不同的USS_DB。
- 当对变频器的参数进行读写操作时,注意不能同时进行USS_RPM和USS_WPM的操作,并且同一时间只能进行一个参数的读或者写操作,而不能进行多个参数的读或者写操作。
在S7-1200 PLC 与变频器的USS通信的实际使用过程中,需要根据网络的现场情况,对问题进行具体的解决。