| 动作方式 |
其他 |
应用领域 |
医疗卫生,环保,食品,石油,印刷包装 |
ULKP・ULK日本喜开理CKD带阀气缸
在通用型气缸中的小、中口径(φ16〜φ40)系列上附带紧凑、高可靠性制动器的带制动器气缸。
行业:安全
ULKP・ULK日本喜开理CKD带阀气缸
【简单的制动器结构】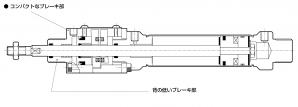
制动部的构成部件非常少,结构简单。
解除制动只需要拧入螺栓、放倒制动板即可,操作简单。
【耐久性、夹持力】
采用新斜板制动方式,制动时的活塞杆接触点由传统的斜板方式的2处变为表面接触,活塞杆承受的阻力呈分散状态。
提高了耐磨性,与传统的斜板方式相比,耐久性也得以大幅提高。
活塞杆夹持力与0.8MPa时的气缸推力相当。
【停止精度 ±1.0mm】
停止精度较高,在气缸速度300mm/s、空载时为±1.0mm。
| 型号 | 名称 | 缸径(mm) | 标准行程(mm) | 备注 |
|---|
| ULKP | 双作用型 | Φ16 | 15, 30, 45, 60 | |
| ULK | 双作用型 | Φ20, Φ25, Φ32, Φ40 | 25, 50, 75, 100, 150, 200, 250, 300 | |
| ULK-V | 双作用型·带阀 | Φ20, Φ25, Φ32, Φ40 | 25, 50, 75, 100, 150, 200, 250, 300 |
设计选型注意事项:
■ 请采取使被驱动物体以及带锁紧机构气缸的可动部位不与人体直接接触的结构。
请安装保护盖以避免人体直接接触。或者,如果存在接触的可能,请设置传感器等,采用在接触前发出紧急停止、危险的通知警告音等安全结构。
■ 请使用考虑活塞杆飞出的平衡回路。
中间停止等在行程中的任意位置使锁紧机构动作,使得仅气缸单侧承受空气压力时,在解除制动时活塞杆会高速飞出。这种情况下,可能会给人体造成伤害(夹住手脚等)以及引起机械损伤,因此请使用类似推荐气动回路的平衡回路,以防止气缸飞出。带阀气缸采用自润滑规格,请确保不进行润滑。否则会导致制动器动作异常。
■ 请注意,夹持力(大静态负荷)是指在空载时使锁紧机构处于动作状态,以保持无振动或冲击的静态负荷的能力。因此,在接近通常夹持力的上限使用时请注意。
■ 锁紧机构动作时,请勿施加有冲击性的负荷或强烈振动及旋转力。从外部施加有冲击性的负荷或强烈振动及旋转力时,夹持力会下降造成危险,请予以注意。
■ 要进行中间停止时,请注意停止精度和超程量。由于是机械锁紧,因此对于停止信号不瞬间停止,而是延时后停止。该延迟导致的滑动行程就是超程量。并且,超程量的大、小范围为停止精度。
● 相对于希望停止位置,请将限位开关按超程量进行前置。
● 限位开关必须具备超程量+α的检测长度(卡箍长度)。
● 本公司气缸开关时,动作范围为7~16mm(因开关型号而异。)超程量超过该范围时,请在开关负荷侧进行接点的自保持。
■ 要进一步提高停止精度,请尽可能缩短从发出停止信号到锁紧机构动作使活塞停止为止的时间。
因此,请使用直流型、响应性良好的控制电路和电磁阀,并将电磁阀与气缸尽可能靠近。
■ 因停止精度会受到活塞速度变化的影响,请务必注意。
气缸往复行程中的负荷变动和外部干扰引起活塞速度的变化时,停止位置的偏差会变大,因此请注意在停止位置前方保证活塞速度恒定。缓冲行程中以及动作开始后位于加速区域期间,由于速度变化较大,停止位置的偏差会变大。
■ 关于基本回路
用于防坠落、紧急停止时,请务必使用以下回路。双位置阀由于在气缸自身的推力停止时仍会作用于锁紧机构部,因此无法使用。请通过下列回路,实现推力、负荷平衡。在锁紧机构承受负荷的状态下,有时不会解除制动。
● 水平负荷时
按照图1进行配管时,停止时会对活塞杆两侧施加相同的压力,解除制动时将防止活塞杆飞出。此外,请在后端安装带单向阀的减压阀,以实现推力平衡。
产品具体详见:ULKP・ULK日本喜开理CKD带阀气缸











 化工仪器网
化工仪器网