 您好, 欢迎来到化工仪器网
您好, 欢迎来到化工仪器网










| 应用领域 | 电子/电池 | 产地 | 德国 |
|---|---|---|---|
| 品牌 | 西门子 |
《销售态度》:质量保证、诚信服务、及时到位!
《销售宗旨》:为客户创造价值是我们永远追求的目标!
《服务说明》:现货配送至全国各地含税(17%)含运费!
《产品质量》:原装正品,*!
《产品优势》:专业销售 薄利多销 信誉好,口碑好,价格低,货期短,大量现货,服务周到!
 |
| 参考价 | 面议 |
更新时间:2022-02-24 11:41:25浏览次数:283
联系我们时请说明是化工仪器网上看到的信息,谢谢!
 |
 |
 |
 |
 |
西门子电缆6ES7902-2AG00-0AA0
FB41称为连续控制的PID用于控制连续变化的模拟量,与FB42的差别在于后者是离散型的,用于控制开关量,其他二者的使用方法和许多参数都相同或相似。
PID的初始化可以通过在OB100中调用一次,将参数COM-RST置位,当然也可在别的地方初始化它,关键的是要控制COM-RST;
PID的调用可以在OB35中完成,一般设置时间为200MS,
一定要结合帮助文档中的PID框图研究以下的参数,可以起到事半功倍的效果
以下将重要参数用黑体标明.如果你比较懒一点,只需重点关注黑体字的参数就可以了。其他的可以使用默认参数。
A:所有的输入参数:
COM_RST: BOOL: 重新启动PID:当该位TURE时:PID执行重启动功能,复位PID内部参数到默认值;通常在系统重启动时执行一个扫描周期,或在PID进入饱和状态需要退出时用这个位;
MAN_ON: BOOL:手动值ON;当该位为TURE时,PID功能块直接将MAN的值输出到LMN,这可以在PID框图中看到;也就是说,这个位是PID的手动/自动切换位;
PEPER_ON: BOOL:过程变量外围值ON:过程变量即反馈量,此PID可直接使用过程变量PIW(不推荐),也可使用 PIW规格化后的值(常用),因此,这个位为FALSE;
P_SEL: BOOL:比例选择位:该位ON时,选择P(比例)控制有效;一般选择有效;
I_SEL: BOOL:积分选择位;该位ON时,选择I(积分)控制有效;一般选择有效;
INT_HOLD BOOL:积分保持,不去设置它;
I_ITL_ON BOOL:积分初值有效,I-ITLVAL(积分初值)变量和这个位对应,当此位ON时,则使用I-ITLVAL变量积分初值。一般当发现PID功能的积分值增长比较慢或系统反应不够时可以考虑使用积分初值;
D_SEL : BOOL:微分选择位,该位ON时,选择D(微分)控制有效;一般的控制系统不用;
CYCLE : TIME:PID采样周期,一般设为200MS;
SP_INT: REAL:PID的给定值;
PV_IN : REAL:PID的反馈值(也称过程变量);
PV_PER: WORD:未经规格化的反馈值,由PEPER-ON选择有效;(不推荐)
MAN : REAL:手动值,由MAN-ON选择有效;
GAIN : REAL:比例增益;
TI : TIME:积分时间;
TD : TIME:微分时间;
TM_LAG: TIME:我也不知道,没用过它,和微分有关;
DEADB_W: REAL:死区宽度;如果输出在平衡点附近微小幅度振荡,可以考虑用死区来降低灵敏度;
LMN_HLM: REAL:PID上极限,一般是100%;
LMN_LLM: REAL:PID下极限;一般为0%,如果需要双极性调节,则需设置为-100%;(正负10V输出就是典型的双极性输出,此时需要设置-100%);
PV_FAC: REAL:过程变量比例因子
PV_OFF: REAL:过程变量偏置值(OFFSET)
LMN_FAC: REAL:PID输出值比例因子;
LMN_OFF: REAL:PID输出值偏置值(OFFSET);
I_ITLVAL:REAL:PID的积分初值;有I-ITL-ON选择有效;
DISV :REAL:允许的扰动量,前馈控制加入,一般不设置;
B:部分输出参数说明:
LMN :REAL:PID输出;
LMN_P :REAL:PID输出中P的分量;(可用于在调试过程中观察效果)
LMN_I :REAL:PID输出中I的分量;(可用于在调试过程中观察效果)
LMN_D :REAL:PID输出中D的分量;(可用于在调试过程中观察效果)
C:规格化概念及方法:
PID参数中重要的几个变量,给定值,反馈值和输出值都是用0.0~1.0之间的实数表示,
而这几个变量在实际中都是来自与模拟输入,或者输出控制模拟量的
因此,需要将模拟输出转换为0.0~1.0的数据,或将0.0~1.0的数据转换为模拟输出,这个过程称为规格化
规格化的方法:(即变量相对所占整个值域范围内的百分比 对应与27648数字量范围内的量)
对于输入和反馈,执行:变量*100/27648,然后将结果传送到PV-IN和SP-INT
对于输出变量 ,执行:LMN*27648/100,然后将结果取整传送给PQW即可;
D:PID的调整方法:
一般不用D,除非一些大功率加热控制等惯大的系统;仅使用PI即可,
一般先使I等于0,P从0开始往上加,直到系统出现等幅振荡为止,记下此时振荡
的周期,然后设置I为振荡周期的0.48倍,应该就可以满足大多数的需求。我记得网络上有许多调整PID的方法,但不记得那么多了,先试试吧。
附录:PID的调整可以通过“开始—>SIMATIC->STEP7->PID调整”打开PID调整的控制面板,通过选择不同的PID背景数据块,调整不同回路的PID参数。
西门子电缆6ES7902-2AG00-0AA0
2.10 下载完成后,可点击“激活连接状态”按钮,查看连接状态,如下图所示,则表示组态的连接已经成功建立。
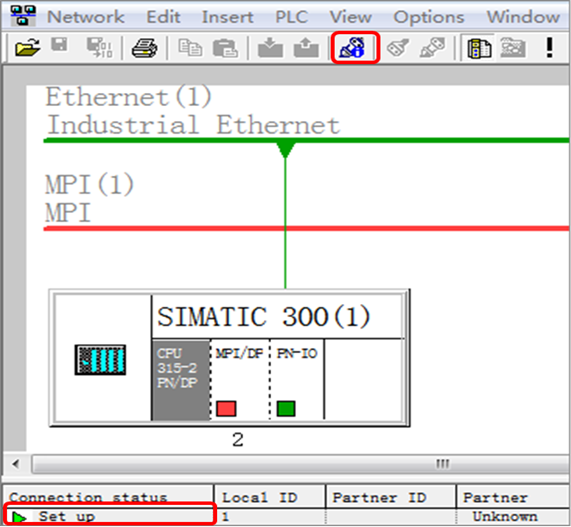
图11.连接已建立
2.11 如果出现如下图所示的情况,则说明连接没有建立,请检查网线的连接、IP地址等。

图12.连接未建立
3.1 组态连接建立成功后,需要调用通讯功能块PUT和GET进行数据交换。S7-300用于通讯连接的功能块位于标准库中,如下图所示:
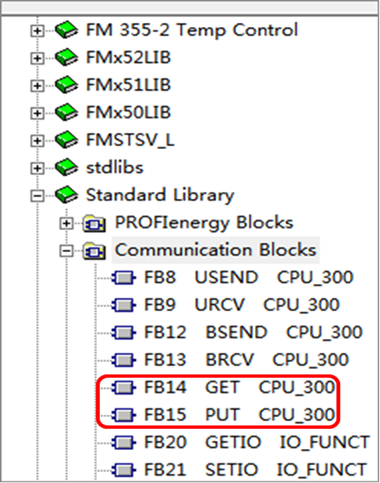
图13.PUT GET指令位置
3.2调用PUT指令,本例中本地S7-300 CPU将DB10.DBB0开始的10个字节写入通信伙伴CPU 的DB11.DBB0开始的10个字节中。
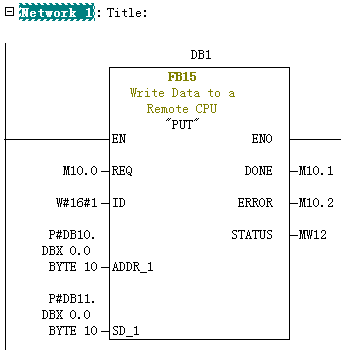
图14.PUT指令
| 参数 | 说明 |
| REQ | 上升沿触发,一次上升沿发送一次数据 |
| ID | 连接ID(参看图8) |
| ADDR_1 | 指向伙伴CPU接收地址区域 |
| SD_1 | 指向本地CPU发送地址区域 |
| DONE | 发送完成(上升沿) |
| ERROR | 有故障发生(上升沿) |
| STATUS | 故障代码 |
表 3 PUT管脚说明
3.3调用GET指令,本例中将通信伙伴CPU的DB20.DBB0开始的10个字节读入到本地S7-300 CPU的DB21.DBB0开始的10个字节中。
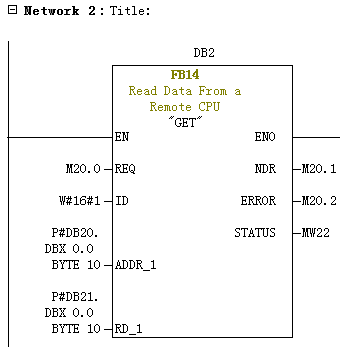
图15.GET指令
| 参数 | 说明 |
| REQ | 上升沿触发,一次上升沿读取一次数据 |
| ID | 连接ID(参看图8 |
| ADDR_1 | 指向伙伴CPU发送地址区域 |
| RD_1 | 指向本地CPU接收地址区域 |
| DONE | 接收完成(上升沿) |
| ERROR | 有故障发生(上升沿) |
| STATUS | 故障代码 |
表 4 GET管脚说明
3.4 S7-300 CPU做S7通讯的客户端时,伙伴CPU无需组态编程,准备好相应的数据区即可,如本例中的DB10和DB20。如果伙伴方是S7-1200(固件版本V4.0以上)或是S7-1500 CPU,需要在CPU属性的连接机制中勾选"允许来自远程对象的PUT/GET通信访问",如下图所示:

S7通信是S7系列PLC基于MPI、PROFIBUS、ETHERNET网络的一种优化的通信协议,主要用于S7-300/400PLC之间的通信。
经过测试发现S7-300/400通过集成的PN口或CP343-1/CP443-1与S7-200 SMART PLC 之间的S7通信也是可以成功的, 但是需要S7-300/400侧编程调用PUT/GET指令。
注意:
1.S7-200 SMART CPU 与S7-300/400 CPU 之间的S7通信未经西门子*测试,本文档仅供客户测试使用,使用该种通信方式所产生的任何危险需要有客户自己承担!
2.S7-200 SMARTPLC V2.0 版本才开始支持PUT/GET通信,V1.0版本的CPU需要升级固件后方可支持PUT/GET。
3. S7-300/400若采用CP通信时,则需要采用Standard或Advanced类型通信模块,CP343-1 Lean模块不支持。
4.本文仅介绍S7-300集成PN口与S7-200 SMART CPU S7通信。
S7通信是S7系列PLC基于MPI、PROFIBUS、ETHERNET网络的一种优化的通信协议,主要用于S7-300/400PLC之间的通信。
S7-300/400通过以太网接口与S7-200 SMART PLC 之间的S7通讯经过测试是可以成功的,但是需要S7-300/400侧编程调用PUT/GET指令,见表1所示。
表 1 PUT和GET :
| S7-400 | S7-300 | 描述 | 简要描述 |
| SFB 14 | FB 14 | 读数据 | 单边编程读访问。 |
| SFB 15 | FB 15 | 写数据 | 单边编程写访问。 |
S7-300/400根据使用通信接口(集成的PN口或CP343-1/CP443-1)不同,调用的功能块来源也不同。
通信接口为S7-300 集成PN接口时,需要使用Standard Library中PUT/GET指令,如图1所示。
图1 S7-300PN接口需采用Standard Library
通信接口为S7-300 CP通信模块时,需要使用SIMATIC_NET_CP 库中PUT/GET指令,如图2所示。
图2 S7-300 CP模块接口需采用SIMATIC_NET_CP库
S7-400 CPU不区分通信接口,需要使用System Function Blocks 中的SFB14/SFB15指令块,如图3所示。
图3 S7-400 需采用SFB程序块
本文以采用1个315-2PN/DP,1个S7-200 SMART PLC为例,介绍它们之间的S7通信。
在STEP7中创建一个新项目,项目名称为S7-300-SMART。插入1个S7-300站,在硬件组态中插入CPU 315-2 PN/DP。如图4所示。 
图4 STEP7 项目中插入S7-300站点
设置CPU 315-2PN/DP的IP地址:192.168.0.1,如图5所示。硬件组态完成后,即可下载该组态。 
图5 设置CPU PN IP地址
打开“NetPro”设置网络参数,选中CPU 315-2PN/DP,在连接列表中建立新的连接。步骤如图6所示。 
图6 NetPro组态视图中插入新连接
选择 Unspecified 站点,选择通讯协议 S7 connection,点击 Apply,如图7所示。 
图7 组态新连接
在弹出的S7 connection属性对话框中,勾选 Establish an active connection,设置Partner address:192.168.0.2(S7-200 SMART PLC IP 地址),如图8所示。 
图8 设置S7连接参数
点击 "Address Details" ,再弹出来的对话框设置 Partner 的 Slot 为1,如图9所示。点击 OK即可关闭该对话框。 
图9 设置“address details”参数
网络组态创建完成后,需要编译,如图10所示。 
图10 保存并编译连接
网络组态编译无错,鼠标先点击 CPU 315-2PN/DP ,然后点击下载按钮下载网络组态,步骤如图11所示。 
图 11 下载组态连接