您好, 欢迎来到化工仪器网
您好, 欢迎来到化工仪器网










| 应用领域 | 化工,地矿,能源,电子,交通 |
|---|
SIMATIC S7-1200,模拟输入, SB 1231 TC,1 AI 热电偶 类型 J 或者 K
 |
| 参考价 | 面议 |
更新时间:2021-03-09 17:14:10浏览次数:143
联系我们时请说明是化工仪器网上看到的信息,谢谢!
 |
 |
 |
 |
 |
哈尔滨西门子S7-1200PLC模块代理商---- 西门子S7-1200RTD模拟量信号模块
西门子S7-1200RTD模拟量信号模块
S7-1200 系列中如今新增了 S7-1200 SM 1231 RTD 模拟量信号模块。 该信号模块的订货号如下所示。
信号模块 | 订货号 |
|---|---|
SM 1231 AI 4 x RTD x 16 位 | 6ES7 231-5PD30-0XB0 |
SM 1231 RTD 模拟量信号模块可测量连接到模块输入的电阻值。 该值可以是温度,也可以是电阻。
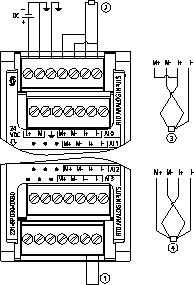
SM 1231 RTD 模块支持采用 2 线、3 线和 4 线方式连接到传感器电阻进行测量。
本产品信息包含有关该信号模块的特性和技术规范的详细信息。有关 S7-1200 产品系列的更多信息,请参考《SIMATIC S7-1200 可编程控制器系统手册》。
如需要技术问题解答、这些产品的培训或订购方面的帮助,请与 Siemens 经销商或销售办事处联系。
模型 | SM 1231 AI 4 x RTD x 16 位 |
|---|---|
订货号 (MLFB) | 6ES7 231-5PD30-0XB0 |
尺寸 W x H x D (mm) | 45 x 100 x 75 |
重量 | 220 g |
功耗 | 1.5 W |
电流消耗(SM 总线) | 80 mA |
电流消耗 (24 VDC) 1 | 40 mA |
输入数目 | 4 |
类型 | 模块参考的 RTD |
范围 | 请参见 RTD 传感器选型表 |
满量程范围(数据字) | 请参见 RTD 传感器选型表 |
过冲/下冲范围 | 请参见 RTD 传感器选型表 |
上溢/下溢(数据字) | 请参见 RTD 传感器选型表 |
分辨率 |
|
大耐压 | ± 35 V |
噪声抑制 | 对于所选滤波器设置(10 Hz、50 Hz、60 Hz 和 400 Hz)为 85 dB |
阻抗 | ≥ 10 MΩ |
隔离 |
|
精度 | 请参见 RTD 传感器选型表 |
可重复性 | ± 0.05% FS |
大传感器功耗 | 0.5m W |
测量原理 | 积分型 |
模块更新时间 | 请参见滤波器选型表 |
电缆长度(米) | 到传感器长为 100 米 |
导线电阻 | 大 20 Ω,对于 10 Ω RTD,大为 2.7 Ω |
共模抑制 | > 120dB |
诊断 | |
上溢/下溢报警2 3 | 支持 |
断线报警 4 | 支持 |
24 VDC 低压报警2 | 支持 |
下表给出了 1231 RTD 信号模块支持的各种传感器的测量范围和精度。
RTD 类型 | 阿尔法 | 欧姆 | 低于范围 小值 | 额定范围 | 额定范围 | 超出范围大值 | 25°C 时的额定范围精度 | 0°C 到 55°C 时的额定范围精度 |
|---|---|---|---|---|---|---|---|---|
Pt | 0.003850 | 10 | -243.0°C | -200.0°C | 850.0°C | 1000.0°C | ± 1.0°C | ± 2.0°C |
50 | ± 0.5°C | ± 1.0°C | ||||||
100 | ||||||||
200 | ||||||||
500 | ||||||||
1000 | ||||||||
Pt | 0.003902 | 100 | -243.0°C | -200.0°C | 850.0°C | 1000.0°C | ± 0.5°C | ± 1.0°C |
200 | ||||||||
500 | ||||||||
1000 | ||||||||
Pt | 0.003910 | 10 | -273.2°C | -240.0°C | 1100.0°C | 1295°C | ± 1.0°C | ± 2.0°C |
50 | ± 0.8°C | ± 1.6°C | ||||||
100 | ||||||||
500 | ||||||||
Ni | 0.006720 | 100 | -105.0°C | -60.0°C | 250.0°C | 295.0°C | ± 0.5°C | ± 1.6°C |
120 | ||||||||
200 | ||||||||
500 | ||||||||
1000 | ||||||||
LG-Ni | 0.005000 | 1000 | ||||||
Ni | 0.006170 | 100 | -105.0°C | -60.0°C | 180.0°C | 212.4°C | ± 0.5°C | ± 1.0°C |
Cu | 0.004270 | 10 | -240.0°C | -200.0°C | 280.0°C | 312.0°C | ± 1.0°C | ± 2.0°C |
Cu | 0.004260 | 10 | -60.0°C | -50.0°C | 200.0°C | 240.0°C | ± 1.0°C | ± 2.0°C |
50 | ± 0.6°C | ± 1.2°C | ||||||
100 | ||||||||
Cu | 0.004280 | 10 | -240.0°C | -200.0°C | 200.0°C | 240.0°C | ± 1.0°C | ± 2.0°C |
50 | ± 0.7°C | ± 1.4°C | ||||||
100 | ||||||||
电阻 | ||||||||
范围 | 150 | n/a | 0 | 150 Ω | 176.383 Ω | ± 0.05% | ± 0.1% | |
300 | n/a | 0 | 300 Ω | 352.767 Ω | ± 0.05% | ± 0.1% | ||
600 | n/a | 0 | 600 Ω | 705.534 Ω | ± 0.05% | ± 0.1% | ||
提示 对于没有连接传感器的激活通道,模块将报告 32767。 如果还启用了开路检测,模块将使相应的红色 LED 闪烁。 对于其它值较低的电阻使用 500 Ω 和 1000 Ω RTD 范围时,误差可能增加到误差的两倍。 若使用 4 线连接,对于 10 Ω RTD 范围,将得到精度。 2 线模式的连接线电阻会导致传感器读数误差,因此无法保证精度。 |
噪声抑制 频率 | 积分 | 4/2 线 4 通道模块 更新时间 | 3 线 4 通道模块 更新时间 |
|---|---|---|---|
10 | 100 | 1.222 | 2.444 |
50 | 20 | 0.262 | 0.524 |
60 | 16.67 | 0.222 | 0.444 |
4001 | 10 | 0.142 | 0.284 |
提示 对 RTD 模块上电后,模块将对模数转换器执行内部校准。 在此期间,模块将报告每个通道的值为 32767,直到相应通道出现有效值为止。 PLC 程序可能需要考虑这段初始化时间。 |
| |
6ES7 231-5PD30-0XB0 | |
① | 环接未使用的 RTD 输入 |
② | 2 线制 RTD |
③ | 3 线制 RTD |
④ | 4 线制 RTD |

FANUC机器人与S7-1200PLCPROFINET通讯步骤
一、PLC组态
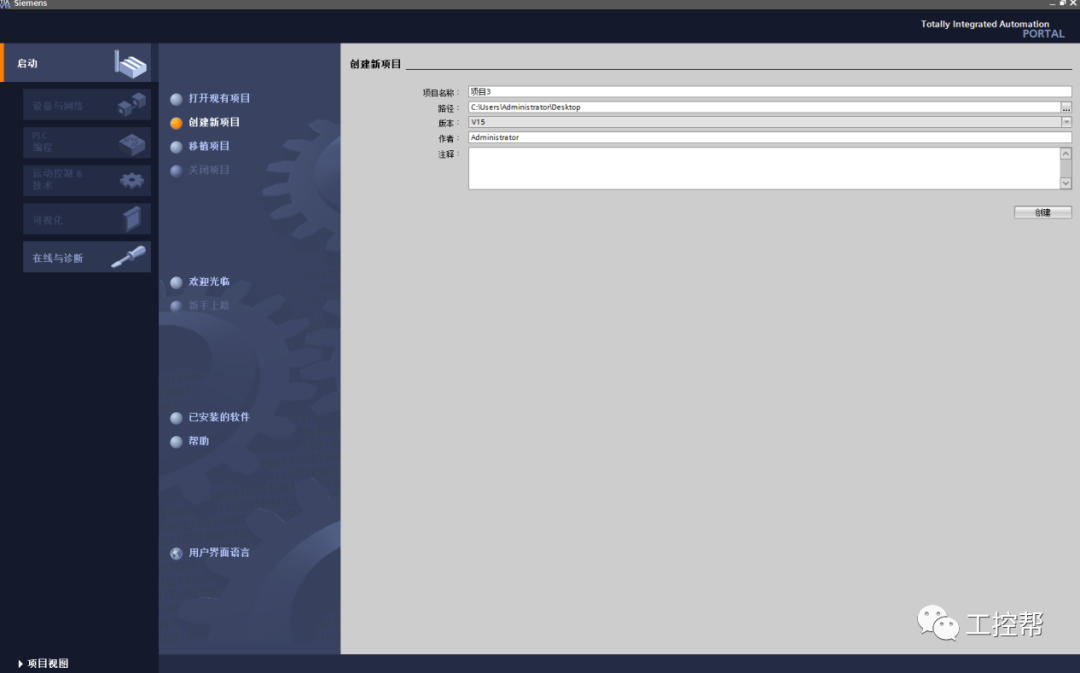
(一) 新建项目
(二) 点击设备与网络,添加新设备
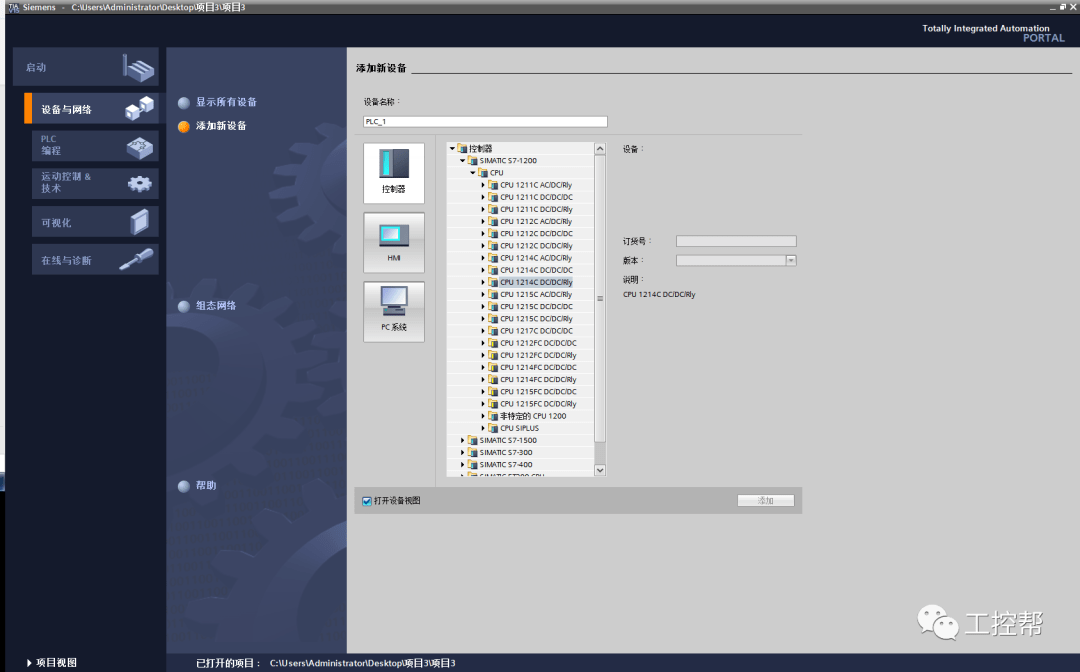
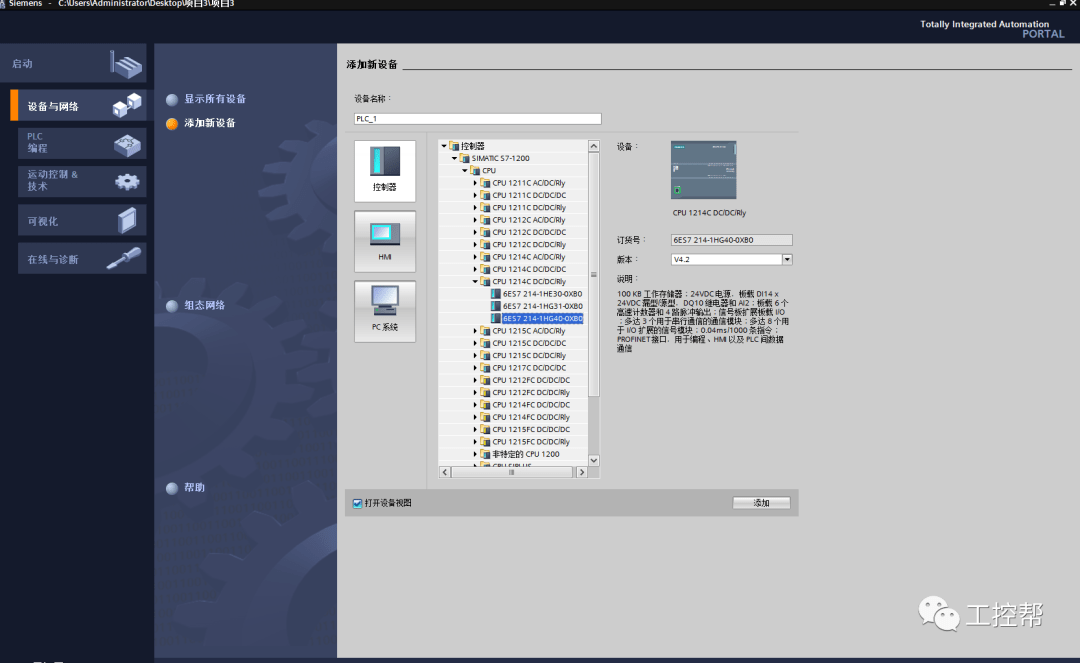
(三) 选择CPU 类型( 注意:PLC型号及版本号要更硬件一致)
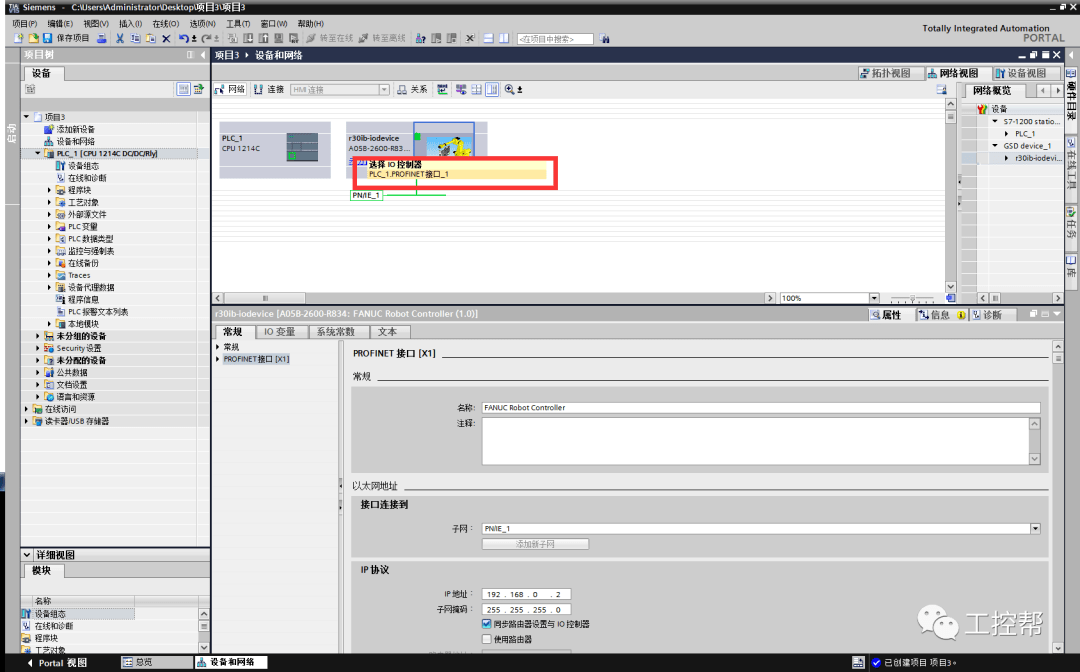
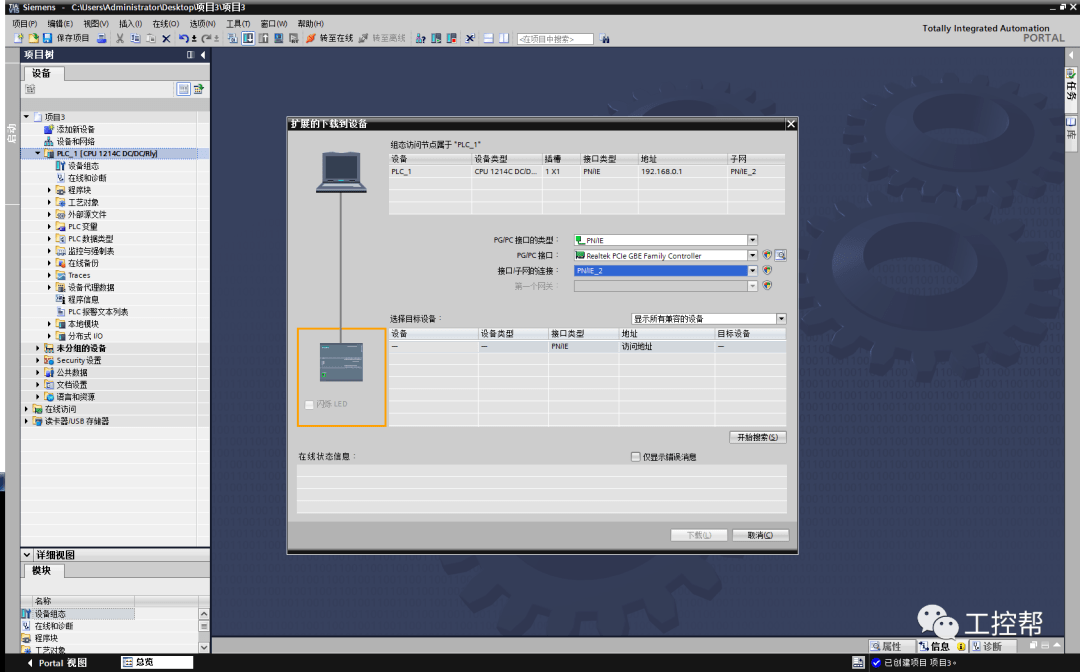
(四) 双击PLC网络端口,建立以太网地址
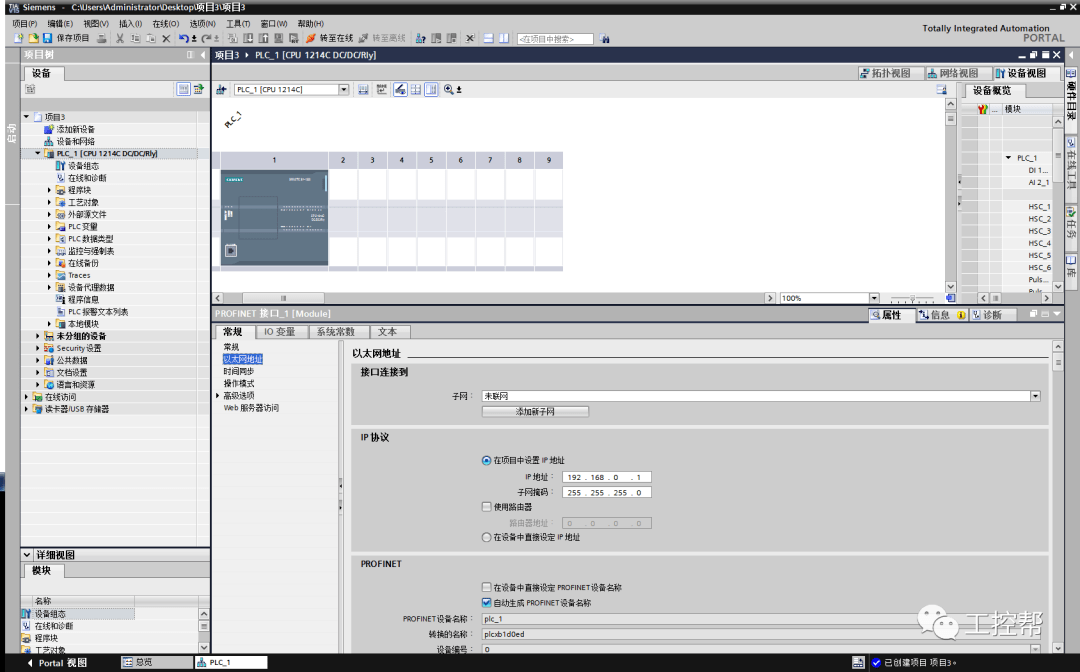
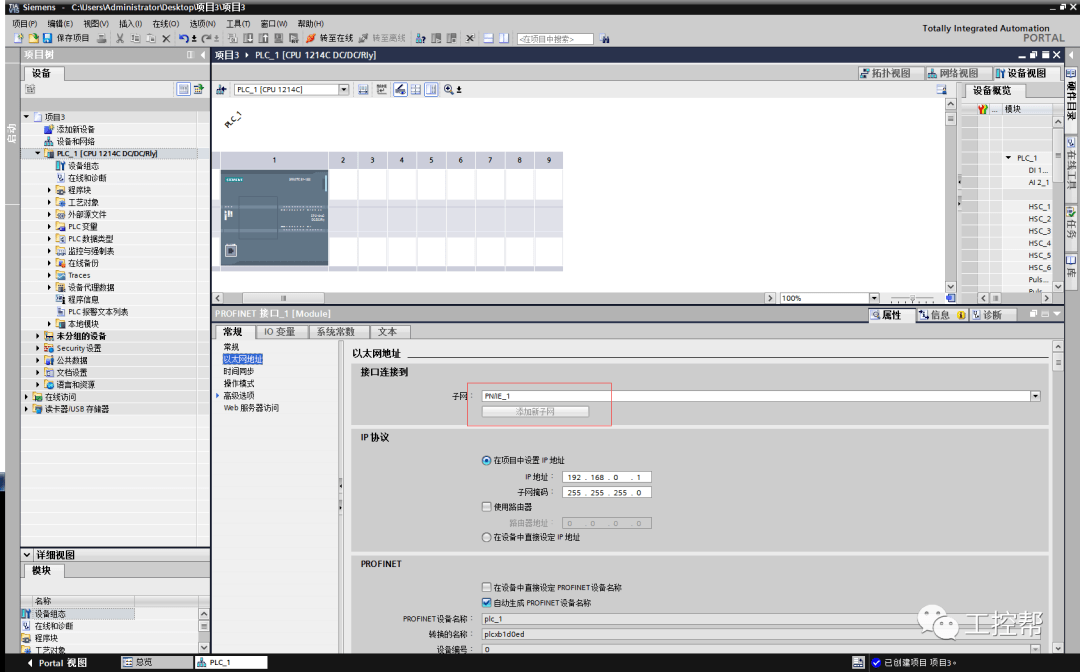
(五) 添加新子网(一般情况位PN/IE1)
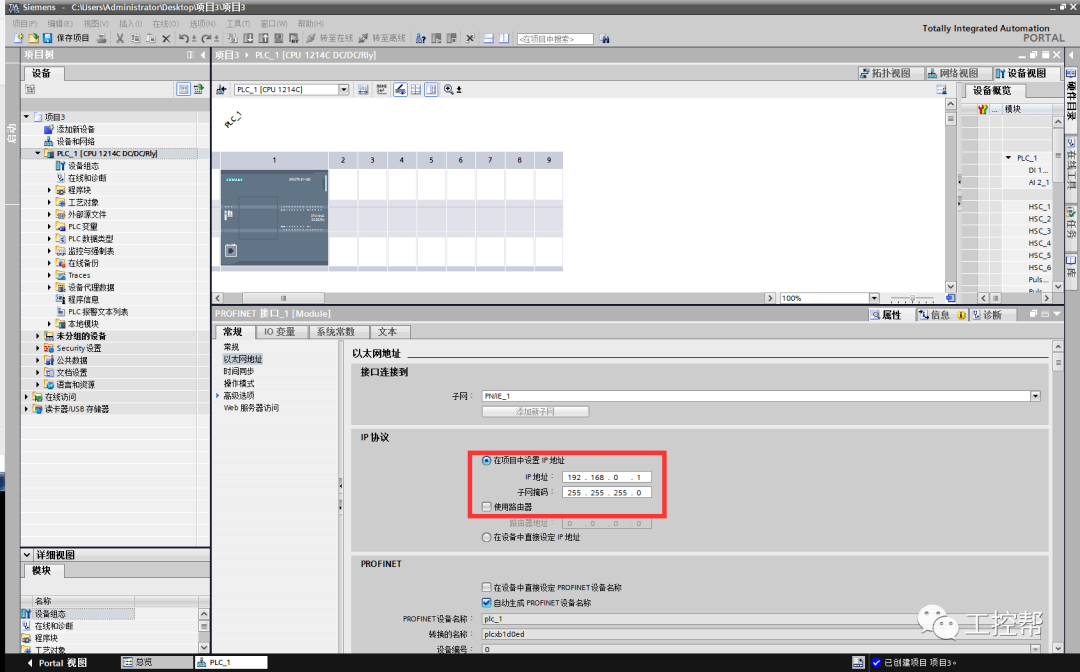
(六) 设定IP地址( 注意:PLC的IP地址要跟机器人的IP地址应在同一网段类)
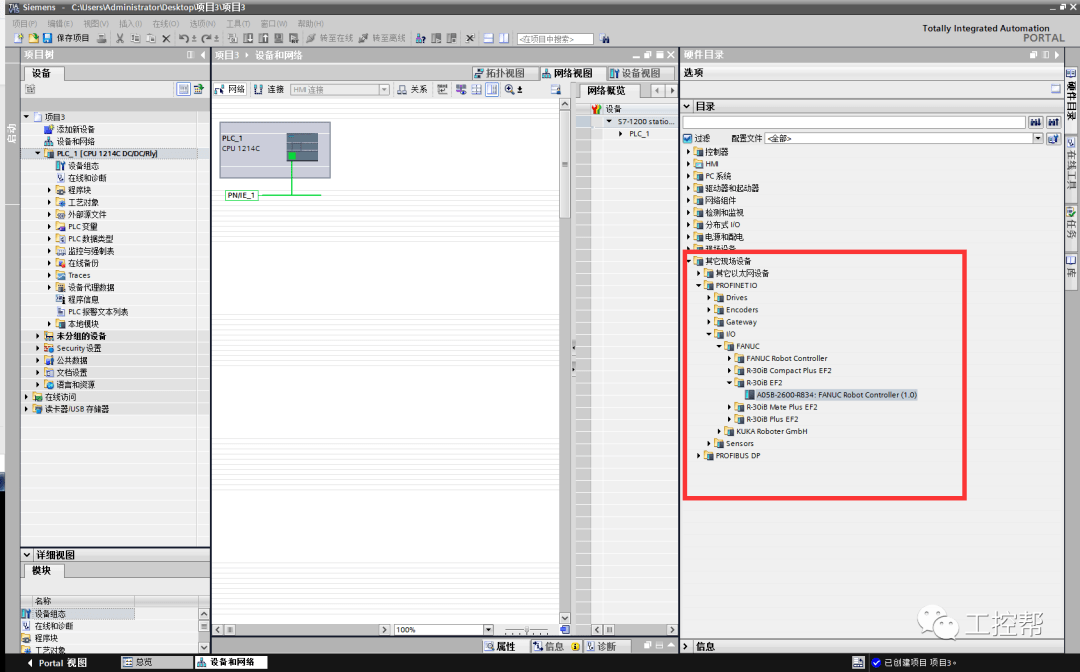
(七) 进入设备和网络,添加机器人(需要提前安装好机器人的GSD文件)
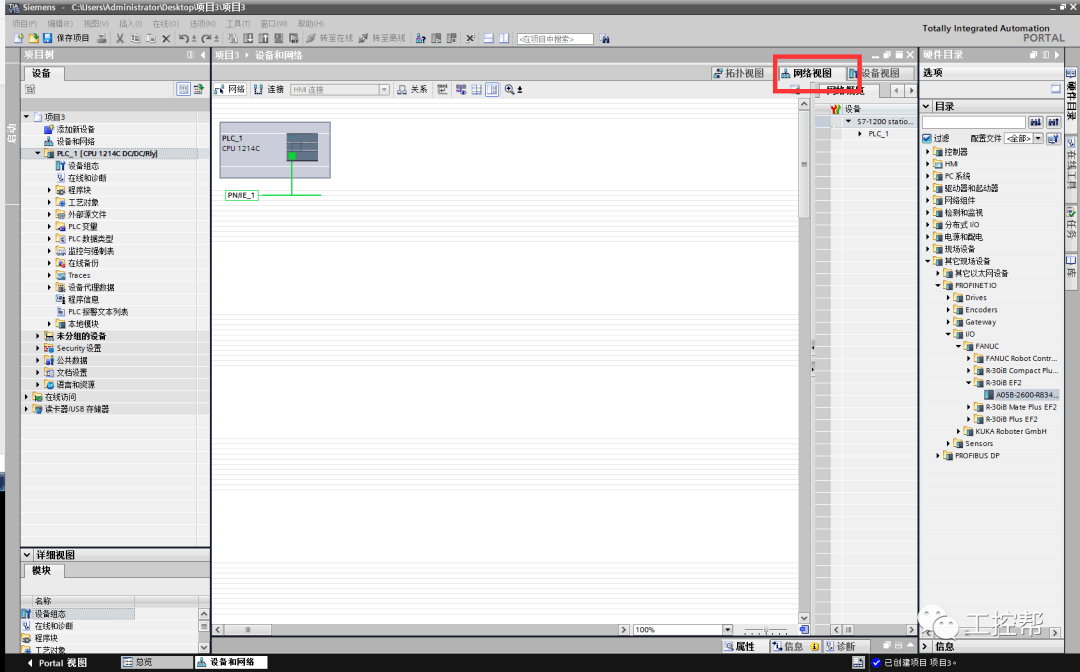
(八) 在右侧选择硬件目录→其它现场设备→PROFINET IO→I/O→FANUC→R-30ib EF2→A05B-2600-R834:FANUC Robot Controller(1.0)
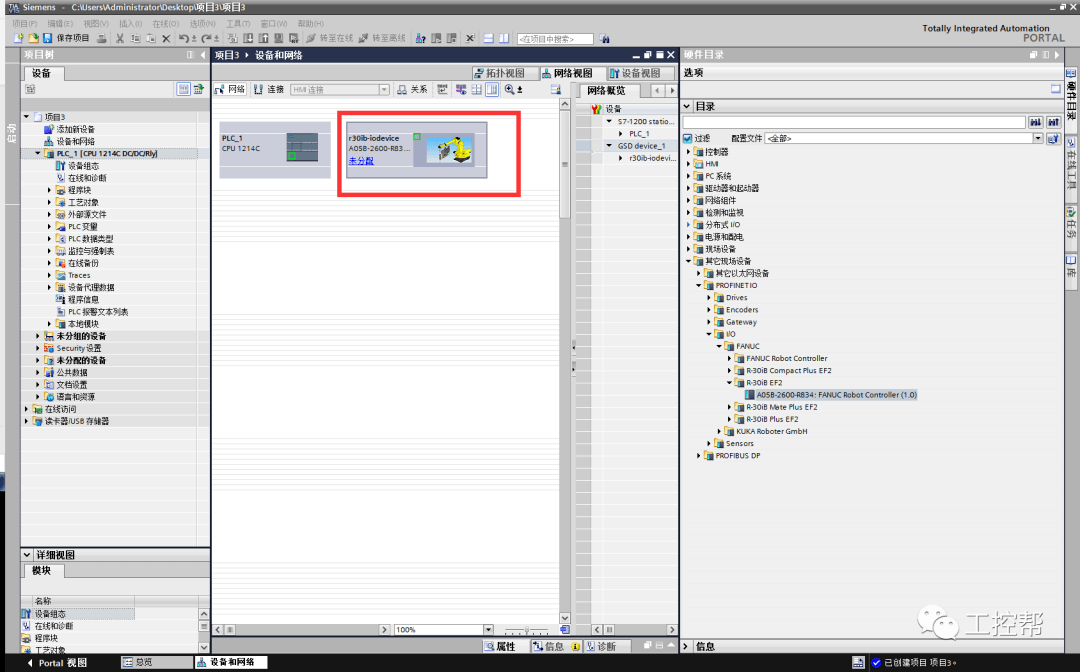
(九) 双击硬件进行组态
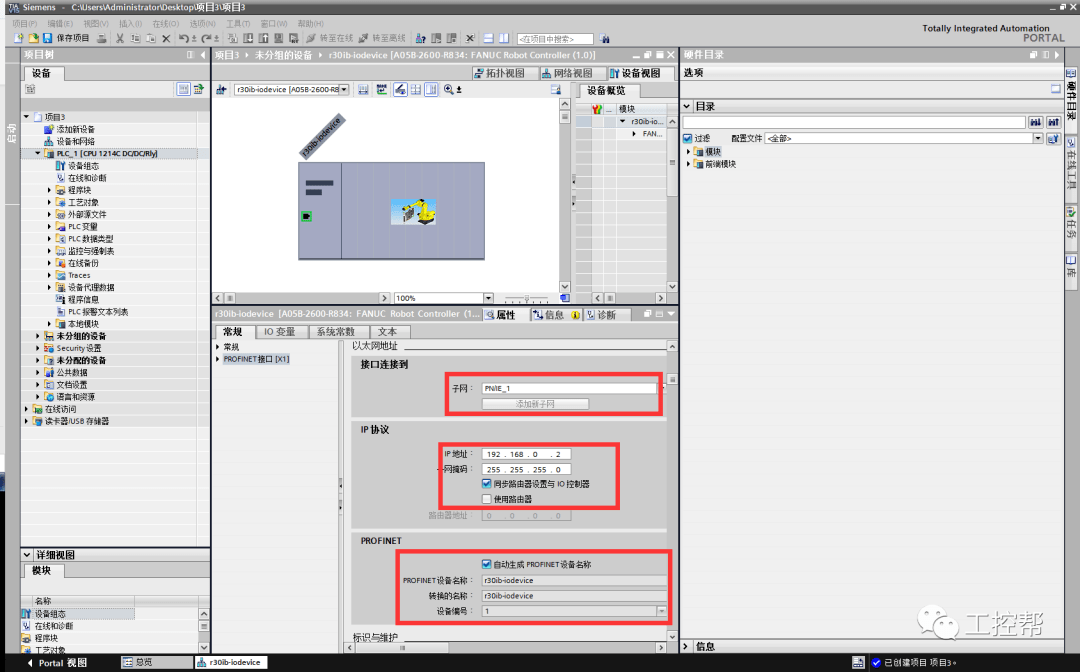
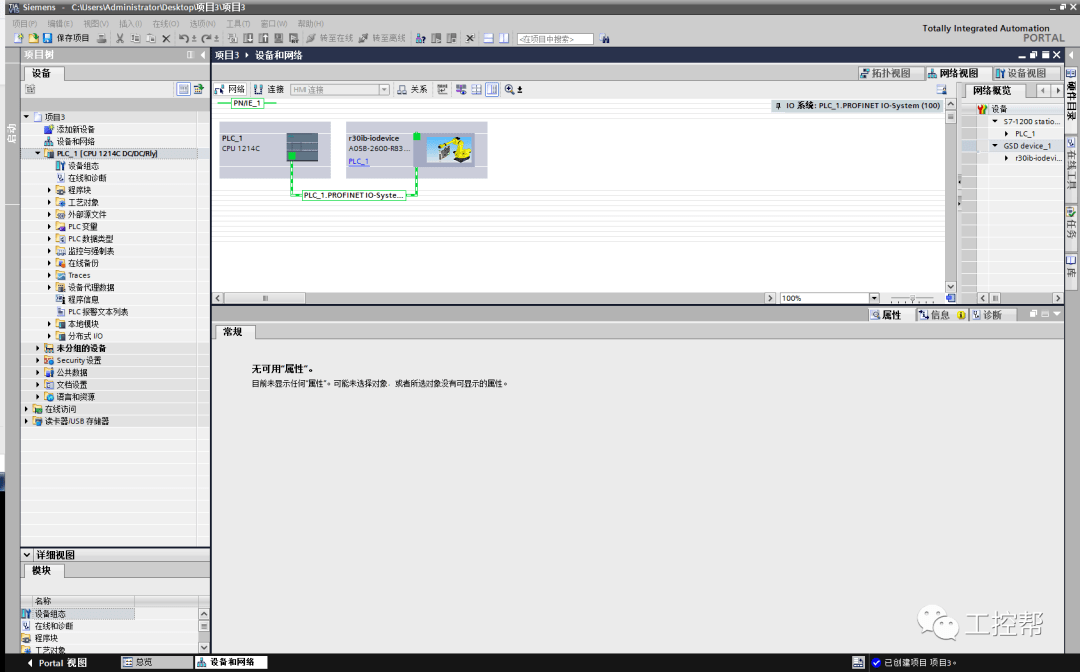
(十) 进行组网。双击机器人硬件端口,添加子网、添加机器人IP地址、PROFINET设备名称( 机器人IP地址应与机器人本体设置的IP地址一致、设备名称与机器人本体设置的名称一致)
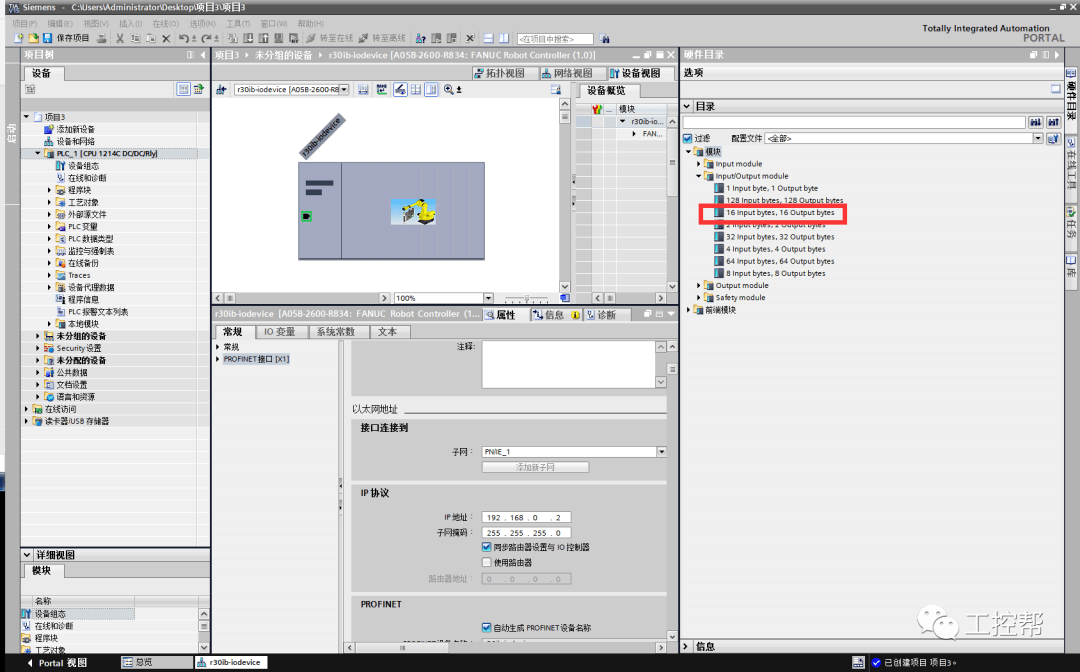
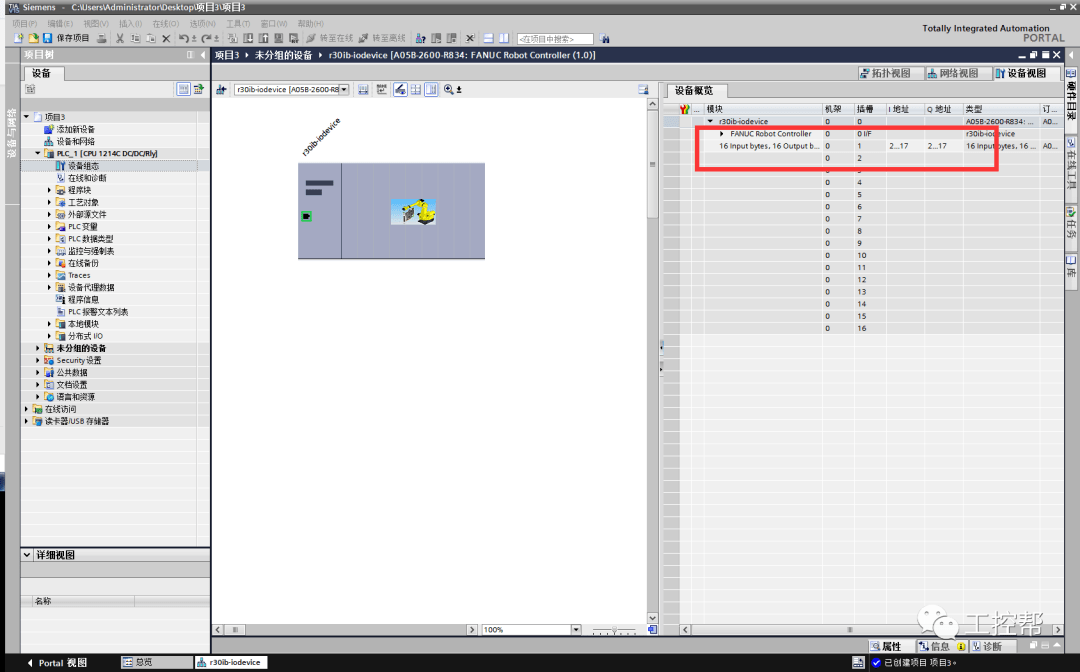
(十一) 根据项目需求添加通讯I/O字节数。此项目添加16字节的输入输出模块
(十二) 返回设备和网络,进行控制器分配
(十三) 分配后,PLC与机器人之间会链接在一起
(十四) 设置机器人IO地址( 此处地址是与机器人通讯的首地址)(此处的I对应机器人的DO、此处的Q对应机器人的DI )
(十五) 组态完成后,进行编译
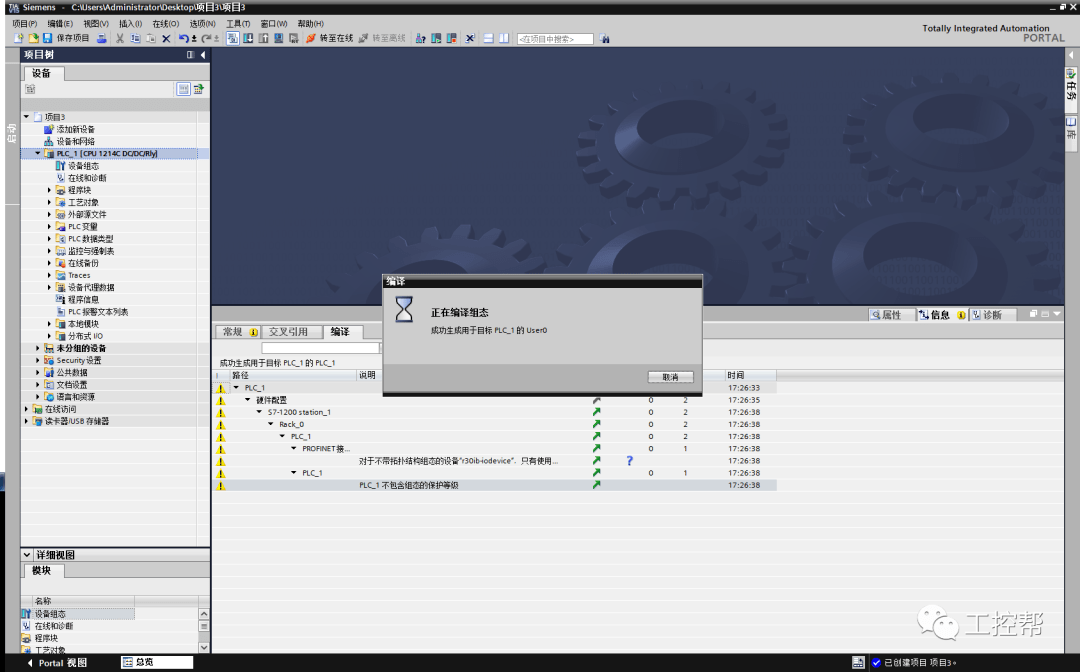
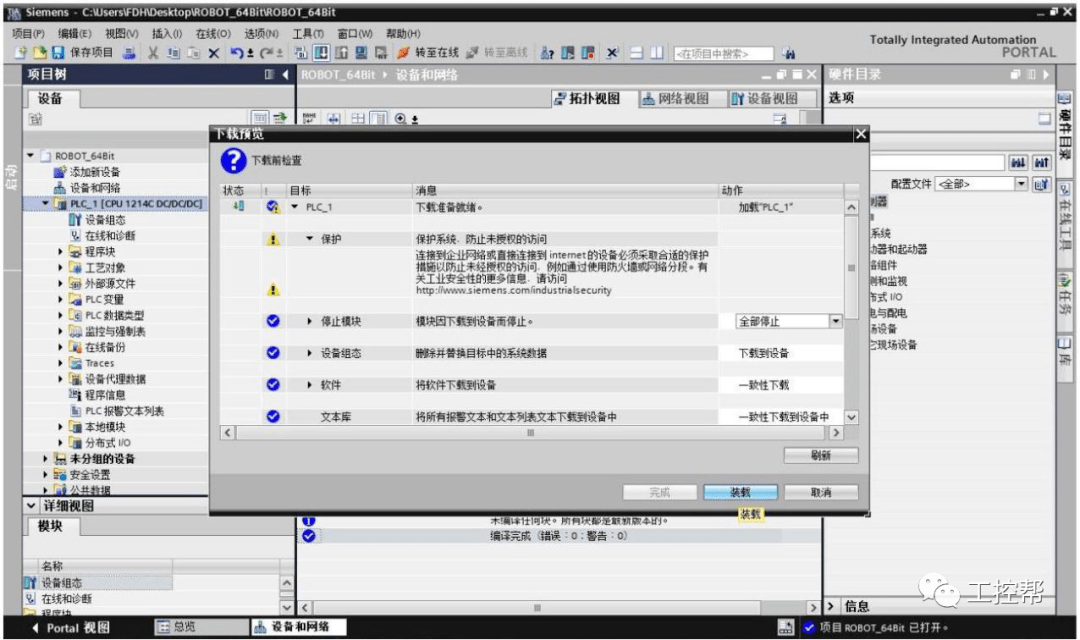
(十六) 编译完成后,下载进PLC中
(十七) 下载、点击装载
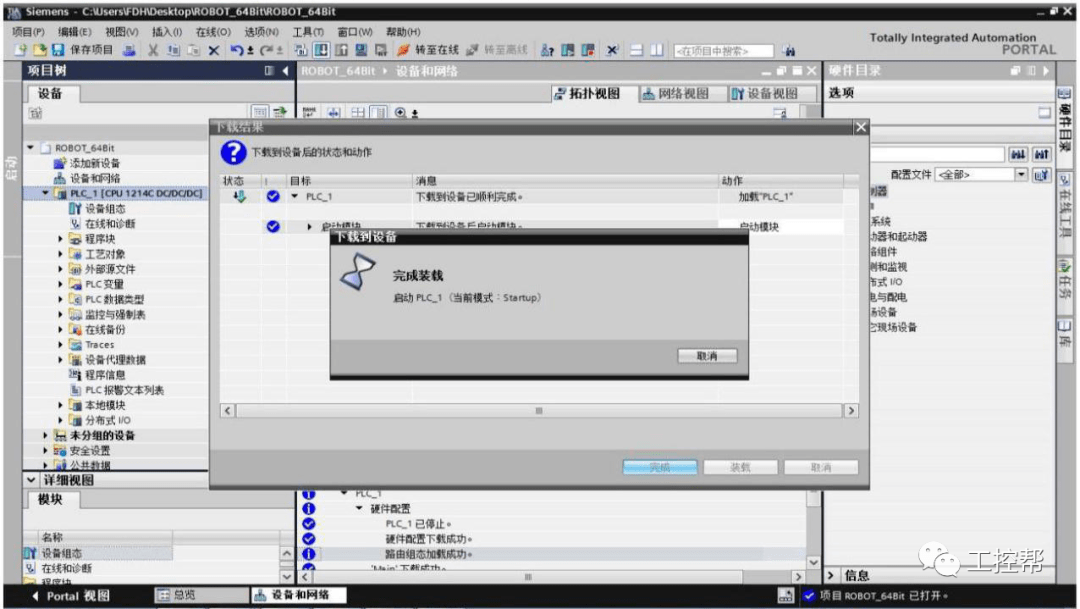
(十八) 下载完成。
二、机器人设置
(一) 设置机器人PROFINET地址: 按下示教器上MEUN键→ 5I/O→选中I/O页面→PROFINET(M) → ENTER →选中 2 频道(备注:2 频道是机器人做从站)→按下 DISP键→ 定址模式选择DCP→选中 IP地址→按下 F4键(编辑)→编辑完成后→按下 F1键→(适用)→完成 IP地址编辑。(备注:2 频道需要点击F5 ,为有效后2频道 方可使用)
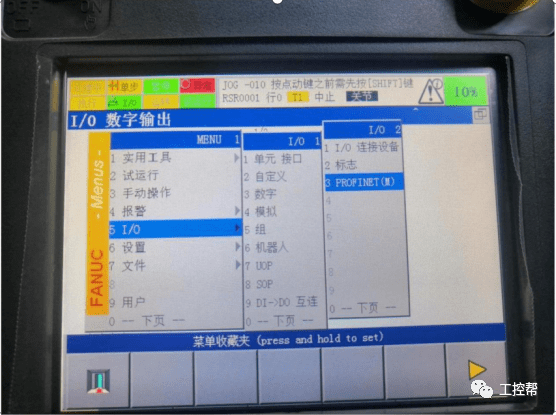
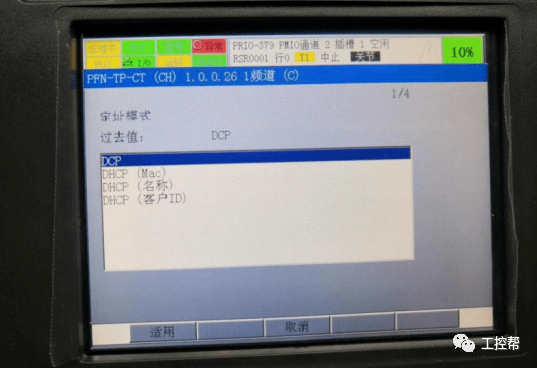
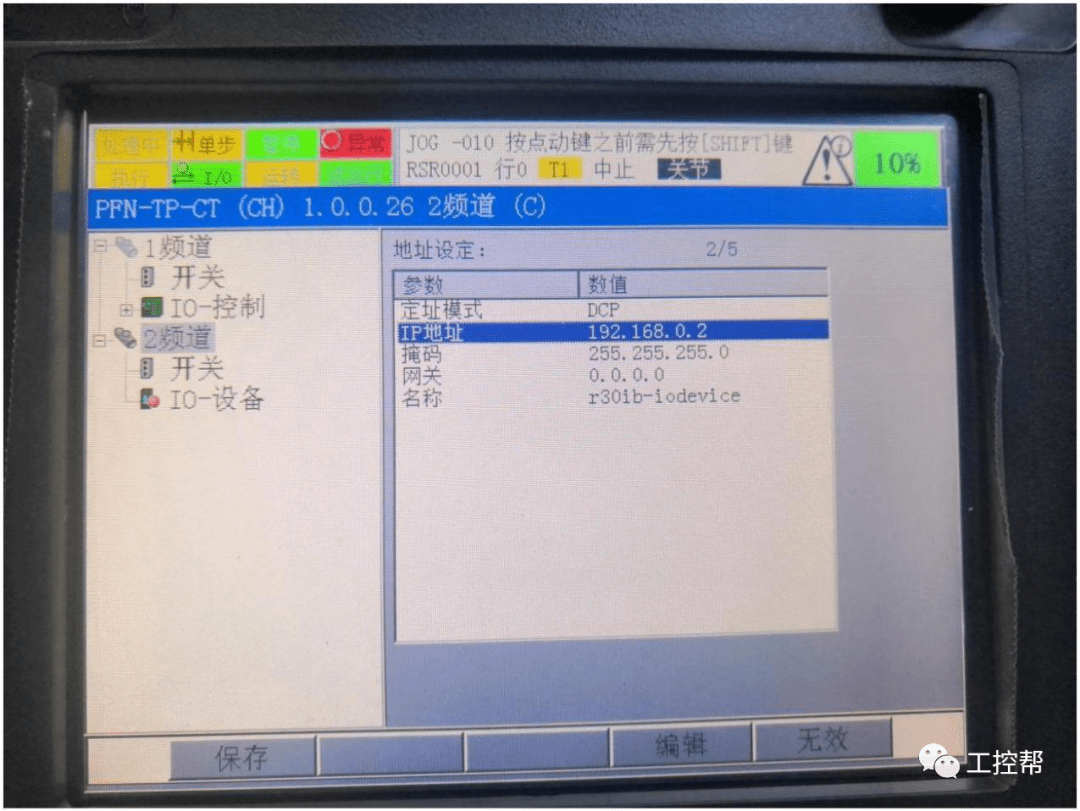
注意:此处地址与PLC组态时地址一致
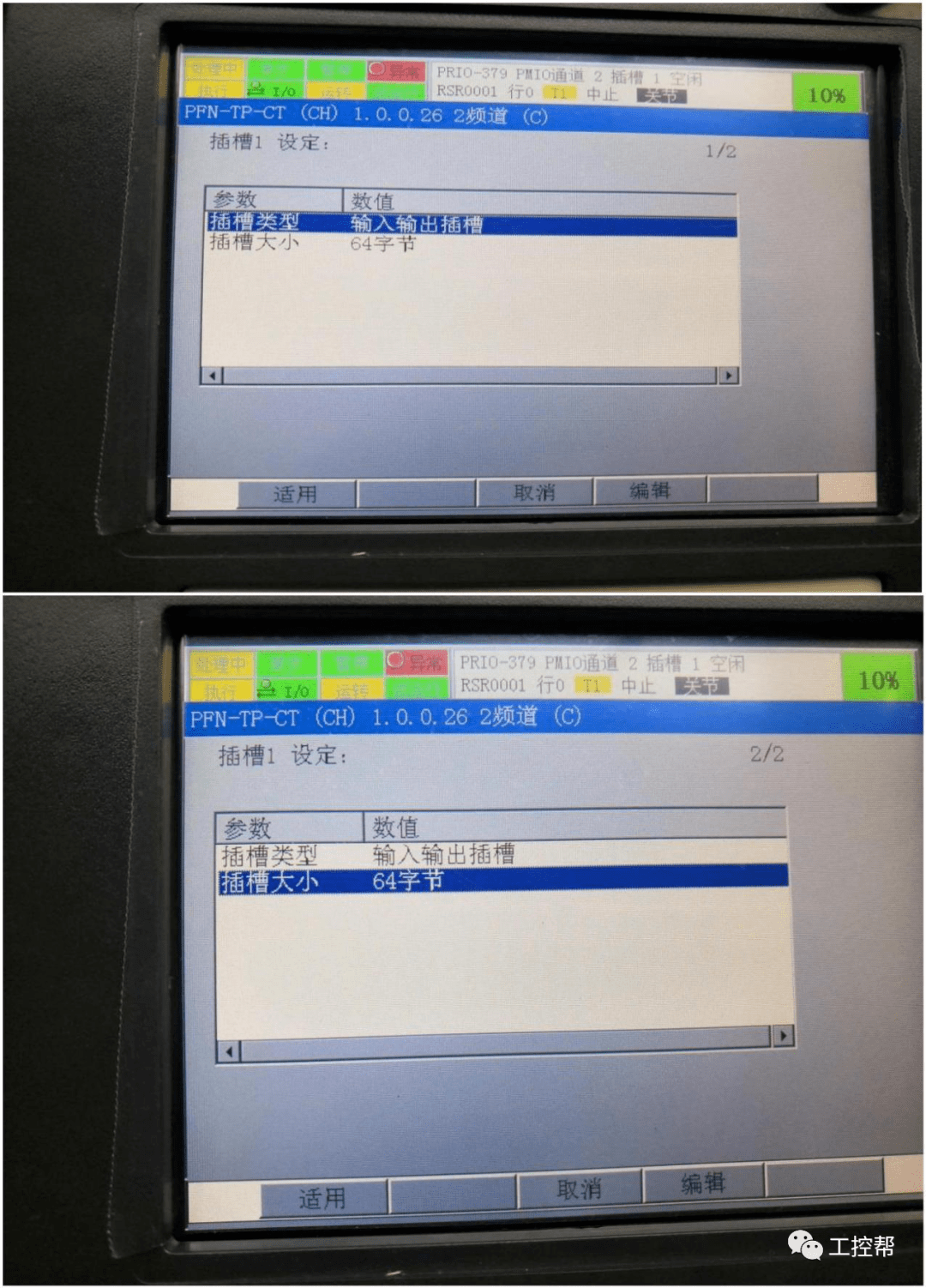
(二) 编辑插槽类型和字节长度:按下示教器上MEUN 键→ 5 I/O → 选中 I/O 页面→PROFINET(M) → ENTER →按下 F4 键(编辑)→选中输入输出插槽→编辑完成后→按下 F1 键(适用)→光标移到插槽大小→按下 F4 键(编辑)选中字节大小→按下 F1 键(适用)→编辑完成。
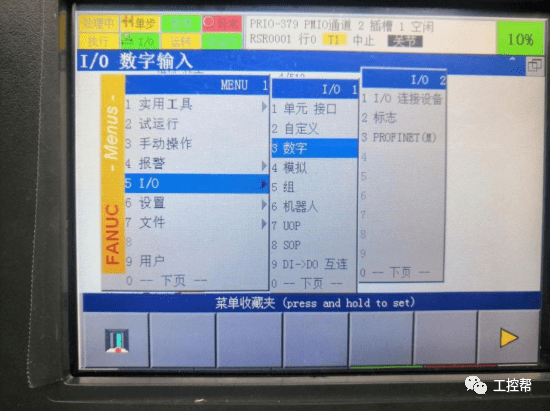
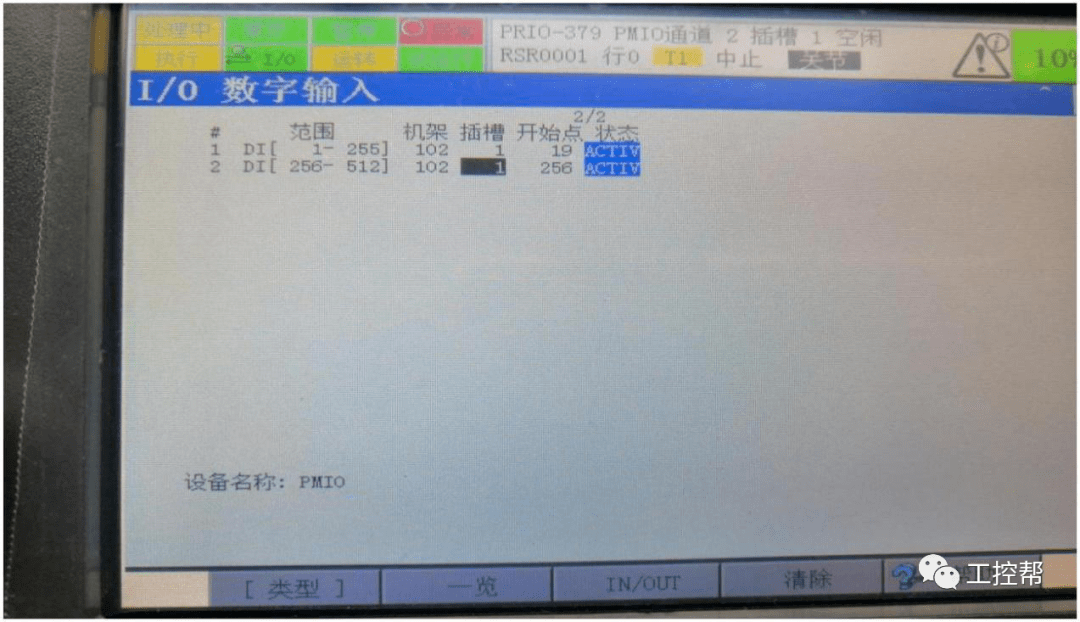
(三)按下示教器上MEUN 键→ 5 I/O → 选中 I/O 页面→数字→ENTER→I/O数字输入→F2(分配)
DI 范围:本项目组态了 64 个字节输入/64 个字节输出所以输入的范围是 1-512 之间;
l 机架:102 机器人做从站,101 是机器人做主站;插槽:1
l 开始点:19,机器人的前面 18 点是作为用的,所以从 18 点开始;
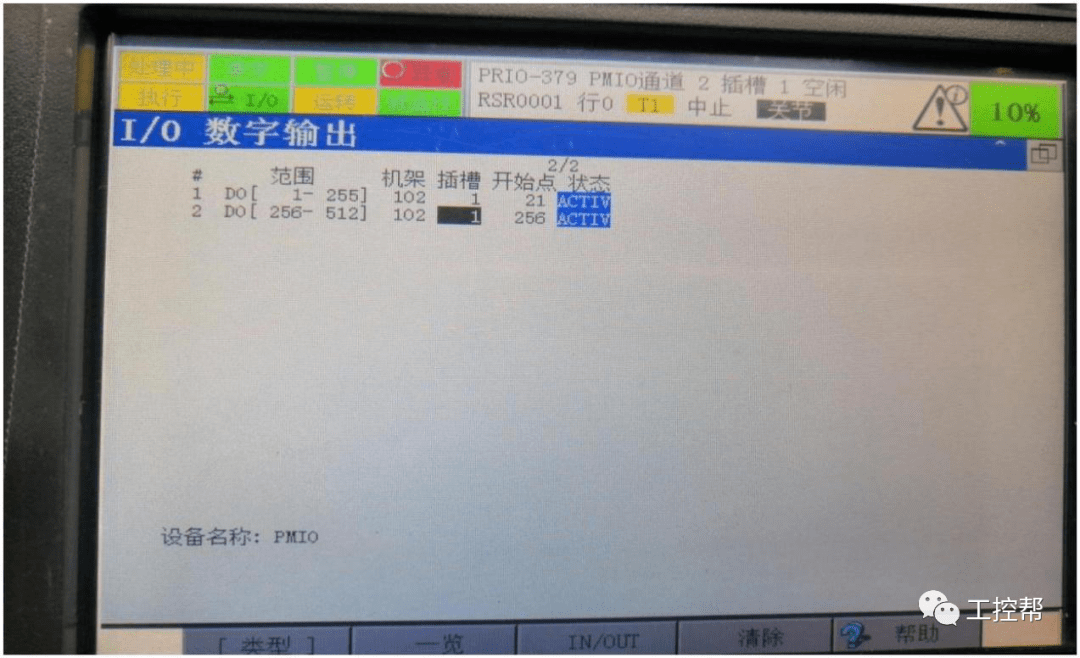
DO 范围:本项目组态了64 个字节输入/64 个字节输出所以输 出的范围是1-512 之间;
l 机架:102 机器人做从站,101 是机器人做主站;插槽:1
l 开始点:21 ,机器人的前面20 点是作为用的,所以从21 点开始;
(四)数字量I/O分配完成。
三、配置UOP信号
u 用IO配置(输入输出)
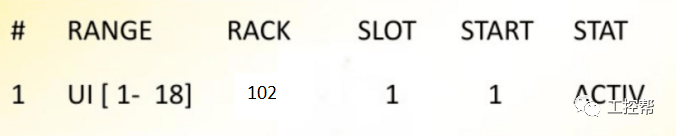
(一) 依次按键操作MENU-IO-UOP,F2切换到分配页面
(二) 依次分配号信号值(RANGE)(UI1-UI18)、机架(RACK)(102)、插槽(SLOT)(1)、开始点(start)(1)。
(三)切换到UO继续分配.(按F3切换到UO页面)
(四) 依次分配号信号值(RANGE)(UO1-UO20)、机架(RACK)(102)、插槽(SLOT)(1)、开始点(start)(1)。

(五)分配完后,重启机器人。重启后状态(STAT)为ACTIV则信号正常
u 用输入信号
1. 用输入信号UI1: *IMSTP 瞬时停止 为 ON
2. 用输入信号UI2: *HOLD 暂停 为 ON
3. 用输入信号UI3: *SFSD 安全速度 为 ON
4. 用输入信号UI4: *Cycle Stop周期停止信号
5. 用输入信号UI5: *Fault reset报警复位信号
6. 用输入信号UI6: *start 外部启动信号(信号下降沿有效)
7. 用输入信号UI7: *Home 回Home输入信号(需要设置宏程序)
8. 用输入信号UI8: *Enable 使能信号
9. 用输入信号UI9-UI16 *RSR1-RSR8 机器人服务请求信号
10. 用输入信号UI9-UI16 *程序号选择信号
11. 用输入信号UI7: *PN滤波信号
12. 用输入信号UI8: *PROD_START 自动操作开始信号(信号下降沿有效)
u 用输出信号
13. 用输出信号UO1: *CMDENBL命令使能信号输出
14. 用输出信号UO2: *SYSRDY系统准备完毕输出
15. 用输出信号UO3: *PROGRUN程序执行输出
16. 用输出信号UO4: *PAUSED程序暂停输出
17. 用输出信号UO5: *HELD暂停输出
18. 用输出信号UO6: *FAULT错误输出
19. 用输出信号UO7: *ATPERCH机器人就位输出
20. 用输出信号UO8: *TPENBL示教器使能输出
21. 用输出信号UO9: *BATALM电池报警输出
22. 用输出信号UO10: *BUSY处理器忙输出
23. 用输出信号UO11-UO18: *ACK1-ACK8证实信号,当RSR输入信号被接受使,会输出一个相应的脉冲信号
24. 用输出信号UO11-18: *SNO1-SNO8该信号组以8位二进制码表示相应当前选中的PNS程序号
25. 用输出信号UO19: *SNACK信号数确认输出
26. 用输出信号UO20: *Reserved预留信号
(六) 配置完成后,测试下机器人DI、DO、UI、UO的通讯结果