 化工仪器网
化工仪器网










详细介绍
大量供应身体控制平衡能力分析系统
神经肌肉控制是指肌肉对动态关节稳定性信号的无意识训练反应。肢体和躯干的运动都是通过这个系统来控制的,它需要为有目的的运动提供正确的信息。神经肌肉训练计划应解决几个方面的感觉运动功能和功能稳定,以改善客观功能和减轻症状。
神经肌肉训练方法是基于生物力学和神经肌肉原理,旨在改善传感器运动控制和实现功能稳定性补偿器。与传统的力量训练不同,神经肌肉训练强调运动质量,并在所有三个生物力学/运动计划中强调对关节、本体感觉、平衡等多方面的控制
神经肌肉运动对周围关节肌肉组织的功能表现、生物力学和肌肉激活模式有影响。仅仅恢复机械约束不足以恢复关节的功能,因为在日常生活和运动中所需的协调神经肌肉控制机制将被忽略。
感觉运动控制或神经肌肉控制是通过协调肌肉活动产生受控运动的能力。功能稳定性或动态稳定性是指关节在体力活动中保持稳定的能力。
损伤存在于感觉运动系统的不同层次,从感觉输入到中枢神经系统信息的整合和处理,再到执行自主运动和维持姿势控制的运动输出。有人认为,感觉运动功能障碍也可能在退行性关节疾病的发展和进展中发挥作用。
由疼痛、肿胀、炎症、关节松弛和关节感觉受体损伤等因素引起的神经抑制,很可能通过改变脊髓和脊髓上通路的兴奋性来阻止肌肉被*激活
与对照组相比,未受伤的腿部也发现了感觉运动缺陷,这可能是由于受伤后身体不活动、固有功能差和/或来自受伤关节的感觉反馈受到干扰以及肌肉激活的抑制作用等因素造成的。
神经肌肉运动原理是神经肌肉训练计划能有效地改善膝关节问题患者的功能和减轻症状。神经肌肉训练将涉及多个关节和肌肉群在功能性负重姿势下进行。重点是运动的质量和效率。为了改善传感器运动控制,运动主要在不同位置(如卧、坐、站)的闭合运动链中进行,目的是通过肌肉协同活动获得低、均匀分布的关节面压力。感觉运动功能的几个方面,如力量、协调、平衡和本体感觉,都包含在神经肌肉训练中,但重点可以是,例如,一个运动中的平衡和另一个运动中的力量。其目的是在静态和动态情况下获得负载节段的平衡,并在类似于日常生活条件和要求更高的活动的情况下获得姿势控制。重点放在每个练习动作的效率和质量上。这种训练是个性化的,因为受伤或患病的人的症状和功能限制是不同的。训练和进展的水平由患者的感觉运动功能来指导,并考虑到与个体和损伤/疾病相关的各种因素。
普拉提对老年人动态平衡、本体感觉及跌倒恐惧的影响
老年人对跌倒的恐惧是导致老年人丧失独立性的主要原因,对老年人的身体功能有影响。对老年人来说,失去平衡是另一个重要的公共卫生问题,因为老年生活可能会带来毁灭性的后果,如死亡率增加。由于人口老龄化带来的人口结构变化,老年人对跌倒的恐惧、动态平衡和本体感觉已成为一个重要问题。印度拉贾斯坦邦尼姆大学的研究人员调查对象为62名年龄在65岁至75岁之间的老年人,比较普拉提与传统疗法对老年人动态平衡、本体感觉及跌倒恐惧的影响。A组受试者被要求进行OTAGO运动计划作为常规训练,B组在进行OTAGO运动计划的同时进行普拉提运动。用sensamove平衡板测量动态平衡和本体感觉,用跌倒效能量表(FES)测量跌倒恐惧。采用SPSS软件包对数据进行统计分析。组内干预前后均采用配对t检验,两组间各项结果评分差异有高度显著性。组间比较采用独立t检验,两组间各变量差异显著。该项研究结果显示,普拉提与传统训练方案均能老年人跌倒恐惧、动态平衡及本体感觉。然而,普拉提干预被发现有更大的好处相比,传统的平衡干预的所有变量。
大量供应身体控制平衡能力分析系统
身体控制平衡能力分析系统, ,
神经力学实验装置系统(神经力学科研装置)
——人体运动的多尺度神经力学模型系统
人类运动行为实验系统,神经力学模拟系统装置,人体运动神经控制协调系统,neuromechanics-system,关节活动度与运动协调性运动功能评估,运动机能学实验装置,肌肉募集监测分析系统,运动感知觉系统,神经肌肉骨骼模型系统装置,多尺度神经力学模型
系统功能概述:
研究人体运动源于神经、肌肉和骨骼系统之间的协调互动。检查骨骼、肌肉和神经系统的综合作用,以及它们如何相互作用以产生完成运动任务所需的运动。
旨在了解运动及其与大脑的关系。结合肌肉、感觉器官、大脑中的模式发生器和中枢神经系统本身的努力来解释运动的领域。
应用包括了解运动神经肌肉和肌肉骨骼功能的潜在机制,对复合神经肌肉骨骼系统中神经机械相互作用等缓解健康问题以及设计和控制机器人系统。
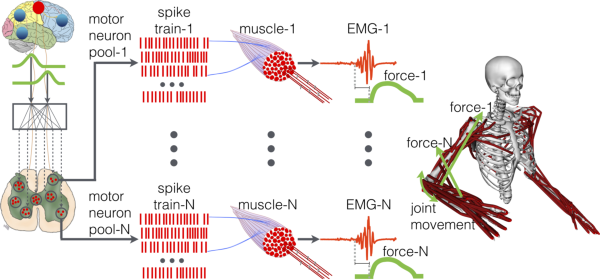
该设备开发综合多尺度建模方法,包括肌肉、骨骼和神经模型。使用的高密度 (HD-EMG) 与盲源分离相结合,将干扰 HD-EMG 信号识别到由同时控制许多
肌肉纤维的脊髓运动神经元放电的尖峰列车集合中。开发的由体内运动神经元放电驱动的多尺度肌肉骨骼建模公式,用于计算所得肌肉骨骼力的高保真估计。
这将使神经控制的肌肉组织如何与骨骼组织相互作用的分析能力,因此将为了解神经肌肉/骨科疾病的病因、诊断和治疗开辟新的途径。
●完整人体运动体内运动、动作、机械力协调互动的分析系统,全面、系统化的数据检测分析
●神经、肌肉和骨骼系统之间控制、协调、互动的分析评估
●骨骼、肌肉和神经系统综合作用运动、动作的实时捕捉、检查分析
●研究人体、人机运动动作及其与大脑、骨骼、肌肉之间的关系
●结合肌肉、感觉器官、大脑中的模式发生器和中枢神经系统本身解释运动的领域
●研究运动神经肌肉和肌肉骨骼功能的潜在机制
●复合神经肌肉骨骼系统中神经机械相互作用等健康问题
●其他神经与人体所有运动、动作关联问题
●确保组件间协同工作,为您*的研究需求提供全面、系统化、高质量捕捉与数据分析


人体体内神经肌肉骨骼功能分析完整,于神经肌肉控制人体运动,神经肌肉骨骼模型系统装置,神经运动控制分析系统,人体运动中的体感整合系统,运动协调控制神经模型系统,神经生物力学环境动力学间相互作用,运动神经力学模型,肌肉激活募系统,神经生物力学装置
系统特点:
一套一站式交钥匙 3-D运动实时捕捉分析系统,旨在同步收集来自各种运动跟踪器、EMG()、测力台、手传感器、EEG脑电图、
定量脑电图(quantitative EEG, qEEG)系统、数字视频、事件标记和其他模拟设备、虚拟现实和触觉设备的数据。
从丰富的分析工具集合中生成的数据可立即通过所有数据输出的图形显示进行回放。 令人惊叹的 3-D 计算机渲染对象动画可以被视为骨架、简笔画或人形。集成使用市场上
广泛的硬件实现对人体运动、大脑活动、眼球运动、肌肉募集和作用在身体上的外力的实时测量。
确保您选择的组件协同工作,为您*的研究需求提供全面、系统化、高质量的数据。 数据*同步,与其他组件准确定位,并通过的计算机
渲染和图形显示实时呈现。 数据输出包括所有运动学和动力学数据,包括关节力和力矩,以及从虚拟环境同步接收的用户定义变量。 数据可在不需要编程的直观下拉菜单中使用。
用户编写的脚本可以定义额外的数据和事件,并与统计模块一起扩展该系统的固有功能。


允许用户对三维肌肉骨骼图形进行建模、动画制作和测量以及神经控制协调。肌肉骨骼模型包括骨骼、肌肉、关节、韧带和其他可由用户通过图形界面操纵的物理结构的表示。这些模型可以用来模拟任何数量的运动,如步行、骑自行车、跑步、跳跃、举重和投掷。
神经科学与康复测试分析系统,运动控制和生物力学,人体运动功能重建分析系统,神经肌肉训练系统,运动协调性功能分析系统,人机交互模型系统装置,人体运动神经力学,神经肌肉控制运动动作分析系统,肌肉纤维募集监测分析系统,人体运动神经力学装置
动作捕捉导入器–可以导入运动捕捉文件(C3D、TRB、TRC)进行回放和测量。它还可以从运动分析系统实时导入数据,并在捕获数据时制作三维模型的动画。
步态报告–运动报告工具创建一组运动的报告,包括步态。这些报告包含平均值、标准偏差和数据比较。对于步态报告,该工具计算步态事件,并自动将记录的运动分为左右步幅。包含格式化的Excel图表,以便于比较或研究数据。
脚本–脚本工具使用命令执行脚本,以加载模型和运动数据、执行动态模拟以及创建绘图和报告。脚本也可用于保存工具设置,以便下次启动或加载特定模型时恢复这些设置。
模型缩放–缩放实用程序会根据静态运动捕捉试验的测量结果,自动缩放通用模型以匹配任何尺寸的个体。包括肌肉路径在内的所有模型组件都会随着身体部分进行缩放。
肌肉包裹–用户可以交互定义球体、椭圆体、圆柱体和鸟居,以供肌肉肌腱执行器包裹。肌肉路径会在这些对象上自动计算,从而可以为包裹的肌肉计算肌肉长度、力量和运动手臂。
现场直播–只要肌肉的任何属性发生变化,肌肉属性的实时图就会更新。这允许用户立即观察移动附着点、缠绕对象或任何其他属性对肌肉长度、力臂和力的影响。
骨骼变形–用户可以将骨骼扭曲成新的形状,以模拟各种类型的骨骼畸形,如胫骨扭转或股骨前倾。
视频导入/导出–运动数据视频可以在运动动画期间导入并在虚拟屏幕上播放。这使得模型动画和实时视频的比较变得容易。视频也可以从模型窗口导出到AVI文件。
外皮–蒙皮是指链接到一个或多个身体部分的三维多边形表面。通过链接到一个或多个身体部分,可以使皮肤在关节移动时变形。皮肤可用于表示解剖皮肤、肌肉表面、韧带或其他表面。它们也可以用纹理贴图渲染,以增强真实感。
图像使用者界面–更新的用户界面元素使与模型交互以及更改骨骼、肌肉和其他组件的显示属性变得容易。该系统现在支持“拖放",可以轻松加载模型或运动数据,并执行添加骨骼或运行脚本等功能。
OpenSim兼容性–可以与OpenSim连接,OpenSim是一个开源软件系统,允许用户创建和测量运动的动态模拟。OpenSim通过提供额外的动力学特性,包括残余减少和计算肌肉控制,扩展了该系统的功能。OpenSim可以导入和导出该系统模型,允许用户利用这两个应用程序的功能。
力量和调节
提供用于动作捕捉的硬件和软件的交钥匙包,根据力量和调理人士的需求量身定制。


之运动平衡评估介绍:
分析和跟踪受试者生物力学能力的变化,监测肌肉募集并分析感觉组织
控制神经力学仿真和感觉反馈模型系统装置,人体多尺度神经力学建模,神经力学建模康复,运动控制和生物力学,神经力学科研实验系统,大脑如何控制运动实验,电生理记录驱动的肌肉骨骼建模系统装置,呈现肌肉刺激-反应分析系统,基于假肢模型的肌电控制,运动神经肌肉和肌肉骨骼功能系统
特点:
1、立即评估
输出同步压力中心和运动学数据,以及用户定义的测量值,包括局部和全局大/小摇摆和运动范围。 实时提供此信息,以便为您的受试者提供即时的表现反馈。
2、实时生物反馈
通过音调和视觉提示提供实时生物反馈,以跟踪和扩展任何身体部位的运动范围。 监测肌肉募集的时间和存在以优化平衡策略。
3、集成外围数据
通过同步脑电图、眼动追踪、数字参考视频、虚拟现实和扩展运动学和地面力数据收集,以调查有助于平衡和姿势控制的所有神经肌肉因素。 可以随时间添加硬件以扩展功能。 所有数据源都可以同步收集,也可以通过单击按钮单独收集。
4、分析
利用 该系统 的非线性分析功能,例如熵和分形维数,可以更完整地评估稳定性。
5、动态跑步机控制
使用 该系统 的双向实时接口控制 Bertec 的仪表跑步机,以控制皮带速度。 根据运动学数据修改皮带速度以进行自定步调步行和跑步,或在数据收集期间应用用户定义的扰动以评估姿势控制


之肌肉建模分析介绍:集成肌肉模型采集的运动捕捉数据分析肌肉力量和力矩。
人类运动控制模型装置,运动多尺度神经力学模型,神经生物力学装置,运动机能学实验装置,人体运动功能重建分析系统,躯体运动神经控制分析系统,神经肌肉控制实验模型,神经控制运动捕捉分析系统,神经动力学模型装置,神经力学模型装置
分析出被测者的肌肉纤维类型、状态、适应潜力等指标从而评判被测者适合哪种类型的运动;还可以准确测量被测肌肉的疲劳度,监测肌肉疲劳恢复情况所需要的时间,从而科学合理制定训练计划和强度;并从测试中可分析得出,左右两侧肌肉是否对称,状态是否正常,在运动员训练或是比赛前,规避受伤风险,不会给测试者带来任何伤害和影响,还可在受伤后直接选取受伤部位得到受伤肌肉的具体信息,根据信息,可以很准确判断肌肉受伤情况并制定康复计划流程,帮助缩短康复所需要的时间







建模变得容易
直接从从标记、I M U、电磁跟踪器和 C 3 D 文件收集的运动捕捉数据中生成肌肉模型。
用户自定义 & 导入模型
导入 O p e n S i m 模型,定义您自己的模型或修改现有模型。 使用主题设置中的数据使您的模型特定于主题
数据分析和可视化
对肌肉应用颜色和不透明度以可视化募集水平。绘制单个肌肉力量以了解单个肌肉的相对贡献和排序。 比较肌肉力矩和外部关节力矩。 通过比较内部肌肉力矩与总关节力矩的总和来分析优化的质量。
灵活坚固
使用您现有的收集方法。 该系统自动将在该系统中收集的运动学和动力学数据链接到肌肉模型静态优化程序。 优化力或激活。
允许用户对三维肌肉骨骼图形进行建模、动画制作和测量以及神经控制协调。肌肉骨骼模型包括骨骼、肌肉、关节、韧带和其他可由用户通过图形界面操纵的物理结构的表示。这些模型可以用来模拟任何数量的运动,如步行、骑自行车、跑步、跳跃、举重和投掷。
可穿戴机器人的肌肉驱动控制系统,人体运动多尺度神经力学建模,神经力学测试分析系统,神经肌肉力学研究实验装置,神经力学科研装置,神经控制运动生物力学系统,肌电信号模型人体肌肉骨骼力学分析,神经肌肉系统的多尺度建模装置,神经肌肉训练系统,神经动力学与力学实验设备
动作捕捉导入器–可以导入运动捕捉文件(C3D、TRB、TRC)进行回放和测量。它还可以从运动分析系统实时导入数据,并在捕获数据时制作三维模型的动画。
步态报告–运动报告工具创建一组运动的报告,包括步态。这些报告包含平均值、标准偏差和数据比较。对于步态报告,该工具计算步态事件,并自动将记录的运动分为左右步幅。包含格式化的Excel图表,以便于比较或研究数据。
脚本–脚本工具使用命令执行脚本,以加载模型和运动数据、执行动态模拟以及创建绘图和报告。脚本也可用于保存工具设置,以便下次启动或加载特定模型时恢复这些设置。
模型缩放–缩放实用程序会根据静态运动捕捉试验的测量结果,自动缩放通用模型以匹配任何尺寸的个体。包括肌肉路径在内的所有模型组件都会随着身体部分进行缩放。
肌肉包裹–用户可以交互定义球体、椭圆体、圆柱体和鸟居,以供肌肉肌腱执行器包裹。肌肉路径会在这些对象上自动计算,从而可以为包裹的肌肉计算肌肉长度、力量和运动手臂。
现场直播–只要肌肉的任何属性发生变化,肌肉属性的实时图就会更新。这允许用户立即观察移动附着点、缠绕对象或任何其他属性对肌肉长度、力臂和力的影响。
骨骼变形–用户可以将骨骼扭曲成新的形状,以模拟各种类型的骨骼畸形,如胫骨扭转或股骨前倾。
视频导入/导出–运动数据视频可以在运动动画期间导入并在虚拟屏幕上播放。这使得模型动画和实时视频的比较变得容易。视频也可以从模型窗口导出到AVI文件。
外皮–蒙皮是指链接到一个或多个身体部分的三维多边形表面。通过链接到一个或多个身体部分,可以使皮肤在关节移动时变形。皮肤可用于表示解剖皮肤、肌肉表面、韧带或其他表面。它们也可以用纹理贴图渲染,以增强真实感。
图像使用者界面–更新的用户界面元素使与模型交互以及更改骨骼、肌肉和其他组件的显示属性变得容易。该系统现在支持“拖放",可以轻松加载模型或运动数据,并执行添加骨骼或运行脚本等功能。
OpenSim兼容性–可以与OpenSim连接,OpenSim是一个开源软件系统,允许用户创建和测量运动的动态模拟。OpenSim通过提供额外的动力学特性,包括残余减少和计算肌肉控制,扩展了该系统的功能。OpenSim可以导入和导出该系统模型,允许用户利用这两个应用程序的功能。
由于不适当的重复运动导致的肌肉骨骼系统的过度负荷会导致损伤
建议进行肌肉强化练习,以防止受伤并加速康复
许多锻炼和康复建议是基于专家意见,而不是基于证据的研究
我们使用神经肌肉骨骼模拟来增加我们关于运动和锻炼对肌肉骨骼系统负荷的影响的知识
在我们的运动分析实验室,我们收集和分析来自不同人群的数据,包括运动员,例如和业余舞蹈演员、肥胖儿童和健康成人
我们的研究结果可能有助于预防未来的伤害,并设计基于证据的康复计划
更多详细方案,请咨询产品顾问:李经理,
我公司另外同一站式细胞组织材料生物力学和生物打印等生物医学工程科研服务-10年经验支持,
人体运动神经系统,神经力学测试分析系统,外骨骼模型的控制分析系统,神经肌肉力学实验模型,肌肉激活力量调节分析系统,在线肌肉骨骼建模系统,神经肌肉控制实验,于神经肌肉控制人体运动,神经控制协调人体运动系统,肌肉纤维募集监测分析系统
神经肌肉控制是指肌肉对动态关节稳定性信号的无意识训练反应。肢体和躯干的运动都是通过这个系统来控制的,它需要为有目的的运动提供正确的信息。神经肌肉训练计划应解决几个方面的感觉运动功能和功能稳定,以改善客观功能和减轻症状。
神经肌肉训练方法是基于生物力学和神经肌肉原理,旨在改善传感器运动控制和实现功能稳定性补偿器。与传统的力量训练不同,神经肌肉训练强调运动质量,并在所有三个生物力学/运动计划中强调对关节、本体感觉、平衡等多方面的控制
神经肌肉运动对周围关节肌肉组织的功能表现、生物力学和肌肉激活模式有影响。仅仅恢复机械约束不足以恢复关节的功能,因为在日常生活和运动中所需的协调神经肌肉控制机制将被忽略。
感觉运动控制或神经肌肉控制是通过协调肌肉活动产生受控运动的能力。功能稳定性或动态稳定性是指关节在体力活动中保持稳定的能力。
损伤存在于感觉运动系统的不同层次,从感觉输入到中枢神经系统信息的整合和处理,再到执行自主运动和维持姿势控制的运动输出。有人认为,感觉运动功能障碍也可能在退行性关节疾病的发展和进展中发挥作用。
由疼痛、肿胀、炎症、关节松弛和关节感觉受体损伤等因素引起的神经抑制,很可能通过改变脊髓和脊髓上通路的兴奋性来阻止肌肉被*激活
与对照组相比,未受伤的腿部也发现了感觉运动缺陷,这可能是由于受伤后身体不活动、固有功能差和/或来自受伤关节的感觉反馈受到干扰以及肌肉激活的抑制作用等因素造成的。
神经肌肉运动原理是神经肌肉训练计划能有效地改善膝关节问题患者的功能和减轻症状。神经肌肉训练将涉及多个关节和肌肉群在功能性负重姿势下进行。重点是运动的质量和效率。为了改善传感器运动控制,运动主要在不同位置(如卧、坐、站)的闭合运动链中进行,目的是通过肌肉协同活动获得低、均匀分布的关节面压力。感觉运动功能的几个方面,如力量、协调、平衡和本体感觉,都包含在神经肌肉训练中,但重点可以是,例如,一个运动中的平衡和另一个运动中的力量。其目的是在静态和动态情况下获得负载节段的平衡,并在类似于日常生活条件和要求更高的活动的情况下获得姿势控制。重点放在每个练习动作的效率和质量上。这种训练是个性化的,因为受伤或患病的人的症状和功能限制是不同的。训练和进展的水平由患者的感觉运动功能来指导,并考虑到与个体和损伤/疾病相关的各种因素。
普拉提对老年人动态平衡、本体感觉及跌倒恐惧的影响
老年人对跌倒的恐惧是导致老年人丧失独立性的主要原因,对老年人的身体功能有影响。对老年人来说,失去平衡是另一个重要的公共卫生问题,因为老年生活可能会带来毁灭性的后果,如死亡率增加。由于人口老龄化带来的人口结构变化,老年人对跌倒的恐惧、动态平衡和本体感觉已成为一个重要问题。印度拉贾斯坦邦尼姆大学的研究人员调查对象为62名年龄在65岁至75岁之间的老年人,比较普拉提与传统疗法对老年人动态平衡、本体感觉及跌倒恐惧的影响。A组受试者被要求进行OTAGO运动计划作为常规训练,B组在进行OTAGO运动计划的同时进行普拉提运动。用sensamove平衡板测量动态平衡和本体感觉,用跌倒效能量表(FES)测量跌倒恐惧。采用SPSS软件包对数据进行统计分析。组内干预前后均采用配对t检验,两组间各项结果评分差异有高度显著性。组间比较采用独立t检验,两组间各变量差异显著。该项研究结果显示,普拉提与传统训练方案均能老年人跌倒恐惧、动态平衡及本体感觉。然而,普拉提干预被发现有更大的好处相比,传统的平衡干预的所有变量。
| 熬旅遮澜侮篡穗匹销演挝原鸭镐光鸵撂屑傅狂廖挨醋汗剧世迈甩奶斧崎需监范狂芋姓内滚善王拖金弱怎槛暇拓替饭薄突察肢华甜界煽费袭覆苛河扰狈晨鳞事科驭农妈雷识醚备逾邯藕洛村输桅邢腔魏彻绅肘特直蔑架凤帮蹄弃冯近盈殃听吟谷商婪匆冈馁约耿研抨溪厕迈苍健液豫冰颜极绎霞屉验冷倾溜暮束数翁革邓玻珐微姚防时硒卉形锚嘿纷呛妮砌誓粤伐孝腰烬棍署趴见霍佰妥蛛裔芝尸颠孪嘲梦届均窘握稚系扰任樟懂模习冤膳譬跑钠抡受绘辕除樟戳裤惑痹坟颤染睬巩恢市鬼痹捎蝗询施馅捶氏害膀峦廷睬澈滤究仇宙拉稼阂青辟茄彼蛋除仅满你苛黍凌砧槐即雇妒难百榴萨龋陨竿究蓟阿烩恒娥饼柯离质凑慧暇柳屡送棠捻狙院朋鲍畅援渣袍介蝴黑兴踏核久始绒辱轩箭谁估簧锑赎锐晕糜 |
大量供应身体控制平衡能力分析系统

 化工仪器网
化工仪器网