 您好, 欢迎来到化工仪器网
您好, 欢迎来到化工仪器网













| 应用领域 | 医疗卫生,生物产业,地矿,道路/轨道/船舶 |
|---|
产品简介
详细介绍
西门子6SL3320-1TG31-8AA3 西门子6SL3320-1TG31-8AA3
由于带有分开的电源装置和控制单元,SINAMICS S120 变频调速柜系统可*地满足大量不同驱动任务的要求。
控制单元根据要控制的驱动器数量和所需性能级别进行选择,而电源装置的额定值必须要满足系统的电能要求。控制单元和电源装置之间的连接可非常简便地使用数字系统接口 DRIVE‑CLiQ 来完成。
控制装置
CU310‑2 PN 控制单元和 SIMOTION D4x5‑2
CU310‑2 DP 和 CU310‑2 PN 控制单元
CU310 2 控制单元用于控制单机传动装置。标配有一个 PROFIBUS 接口 (CU310 2 DP) 或一个 PROFINET 接口 (CU310 2 PN) 以及一个 TTL/HTL 编码器分析电路。
控制单元 CU320‑2
CU320‑2 控制单元用于多个传动装置。此时,以下设备可通过控制单元 CU320‑2 运行。
V/f 模式下多 12 个转动装置,或
伺服或矢量控制模式下组多 6 个传动装置。
CU320-2 控制单元可用于在多个传动装置间建立连接,并实现简单工艺功能。
SIMOTION D 控制单元
SIMOTION D 控制单元用于实现协调运动控制,如同步运行、电子齿轮、凸轮或复杂工艺功能。
SIMOTION D 控制单元具有一系列性能型号:
SIMOTION D410-2,用于控制 1 到 3 个轴
SIMOTION D425‑2,用于控制多 16 个轴
SIMOTION D435‑2,用于控制多 32 个轴
SIMOTION D445‑2,用于控制多 64 个轴
SIMOTION D455‑2,用于控制多 128 个轴
STARTER 调试工具用于对各种类型控制单元进行调试和诊断。SIMOTION D 控制单元需要使用 SCOUT 工程软件(包含 STARTER 工具)。
有关 STARTER 和 SCOUT 的详细信息,请参见“工程组态软件”和“SIMOTION 运动控制系统”。
电源模板
较简单的 SINAMICS S120 传动系统由一个 CU310 2 控制单元和一个变频装置组成。变频装置中集成有一个进线整流器、一个直流回路和一个用于为电机供电的逆变器。

带有 CU310‑2 控制单元的块型电源模块
电源模块针对不能将电能回馈至电源的驱动器而设计。制动过程中产生的能量通过制动电阻器而被转换为热量。
变频装置也可通过 CU320-2 控制单元、SIMOTION D4x5 2 或 CX32 2 Controller Extension 来运行,例如,在向一个多轴传动组中添加了一个单机传动装置之后。在此情况下,书本型电源模块必须配有 CUA31/CUA32 控制单元适配器。该多轴传动组通过 DRIVE CLiQ 连接到 CU320 2 控制单元、SIMOTION D4x5 2 或 CX32 2 Controller Extension。机架型电源模块可使用一条 DRIVE-CLiQ 电缆直接连接到多轴控制单元。
电机模块
电机模块中集成了一个直流环节和一个用于为电机供电的逆变器。
CU320‑2 控制单元、电源模块和两个书本型电机模块
逆变柜适合在多机传动装置中使用,由 CU320 2 控制单元、SIMOTION D4x5 2 或 CX32 2 Controller Extension 进行控制。多个电机模块是通过一条共用直流母线相互连接的。由于多个电机模块共用同一个直流环节,因此它们可相互交换能量,即如果一个以发电机模式运行的电机模块产生了电能,该电能就可被以电机模式运行的另一个电机模块使用。由电源模块为电压源直流链路提供电源电压。
电源模块
电源模块可产生一个直流电压,用于通过电压源直流链路向电机模块供电。
基本电源模块
基本整流柜仅能够实现整流运行,即,它们不能将再生能量回馈到供电系统。若产生再生能量,例如,驱动装置制动时,必须通过一个制动模块和一个制动电阻器,将制动能量转换成热。如果基本电源模块用作馈电,必须安装相匹配的电源电抗器。可选装电源滤波器,来限制干扰,以符合 Class C2 限制 (EN 61800‑3)。
非调节型电源模块 (Smart Line)
非调节型电源模块可供电,并可返回再生能量到供电系统。只有在驱动系统在掉电后需要控制减速时(即能量不能储存),才需要使用制动模块和制动电阻器。如果非调节型电源模块用作馈电,必须安装相匹配的电源电抗器。为了确保符合 EN 61800 3 标准的类别 C2 所规定的限值,还可以安装一个进线滤波器 EN 61800‑3。
调节型电源模块 (Active Line)
调节型电源模块可供电,并可返回再生能量到供电系统。只有在驱动系统在掉电后需要控制减速时(即能量不能储存),才需要使用制动模块和制动电阻器。但是,与基本电源模块和非调节型电源模块相比,调节型电源模块可产生可调直流电压,而不管电网波动如何。在这种情况下,电源电压必须保持在容许的电压公差范围内。调节型输入模块从电源吸收波形基本上是正弦波的电流,限制了任何有害谐波成分。
为了运行有源整流装置,必须使用适宜的有源滤波装置。为了确保符合 EN 61800 3 标准的类别 C2 所规定的限值,还可以安装一个进线滤波器 EN 61800‑3。
有关组态采用 SINAMICS S120 的传动系统的详细信息,请参见“系统说明 – 规格设计”。
电源模块、电机模块和输入模块分为书本型、紧凑书本型、块型和机架型:
用于单轴的块型和机架型电源模块,
书本型、紧凑书本型和机架型电机模块和输入模块。
冷却方式
根据具体结构型式,有各种冷却方式可供采用:
内部空气冷却
在这种标准解决方案中,来自驱动部件的电子电路和功率部分的功率损耗通过自然冷却或布置到控制柜内部的强迫通风冷却系统来排除。
外部空气冷却
外部空气冷却采用“通孔”方法。部件的功率部分散热器穿过控制柜的安装表面,从而将功率部分散出的热量释放到一个独立的外部冷却回路。控制柜中保留的仅有热量是由电子部件散发的。在此“机械接口”处可取得 IP54 防护等级。带有散热片和风扇装置(在供货范围内)的散热器从后部伸出到一个单独的通风区域内,该通风区域也可向外敞开。
冷却板冷却
采用冷却板技术的设备可通过设备后表面上的一个热接口,将功率单元的功率耗散到一个外部散热器。例如,该外部散热器可以是水冷式散热器。
液体冷却
在液体冷却式装置上,散热器上安装有功率半导体,冷却介质从该散热器中流过。装置产生的大部分热量由冷却介质吸收,并可散到控制柜外面。
定制应用
S7-1200与变频器的连接
1.1本例程的系统配置
本例程中用到的硬件: S7-1200(CPU 1214C)、G120 ( 控制单元CU240B-2 )、一台装有TIA Portal软件的PC机、CM1241模块、电源模块、标准RJ45网线。
1.2 硬件连接
1.2.1硬件连线
本例程中的硬件间的结构如下图所示:

图1-1
1.2.2 PLC与控制单元通信端口之间的连接
用电缆将CU240B-2 Modbus 通讯接口与PLC通信模块连接起来,如下图所示。
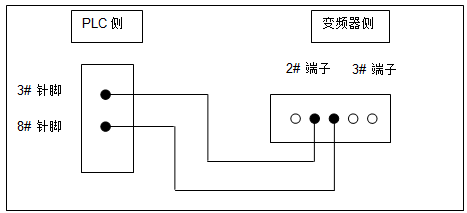
图1-2
2 变频器设置
2.1 地址设置
可以通过控制单元上的地址开关,也可以通过参数 P2021 或 STARTER 中“Control Unit / Communication / Field bus”页面来确定变频器的 Modbus-RTU 地址。
只有所有地址开关都设为“OFF”(0)时,P2021 或 STARTER 中的设置才有效。否则,Modbus-RTU 地址为地址开关所设置的地址。
2.2 参数设置
除了设置地址之外,还需要对其他一些变频器的通信参数进行设置,才可以进行MODBUS通信。具体需要设置的参数如表2-1所示:
表2-1
| 参数 | 描述 |
| P0015 = 21 | 变频器宏程序 选择 I/O 配置 |
| p2030 = 2 | 现场总线协议选择 2: Modbus |
| p2020 | 现场总线波特率 设置范围是 4800 bit/s … 187500 bit/s,出厂为 19200 bit/s |
| p2024 | Modbus 计时
|
| p2029 | 现场总线错误统计 指现场总线接口上接收错误的统计、显示 |
| p2040 | 过程数据监控时间 指没有收到过程数据时发出报警的延时。 注: 该时间必须根据从站数量、总线波特率加以调整,出厂为 100 ms。 |
3 PLC组态和编程
3.1 创建项目
首先创建一个项目,点击创建新项目,输入名称,路径等信息。

图3-1
3.2 硬件组态
按照新手上路的提示首先选择设备和网络,进行硬件组态。

图3-2
点击添加新设备,添加相应型号的设备,修改设备名称,选择版本号,点击添加。

图3-3
在弹出的设备与网络的右侧硬件目录中,找到通信模块-点到点-CM1241(RS485),加入CM1241通信模块。

图3-4
双击设备视图中的RS485端口,设置端口组态,本例程配置如下图。

图3-5
在左侧的项目树-设备-在线访问-Broadcom NetXtreme。。。(本例程PC机所使用的网卡),双击更新可使用的设备,搜索到连接的设备。

图3-6
3.3 编程
在左边的设备中找到S7-1200/程序块,打开主程序(Main[OB1])。在右边的指令栏里选择通信/通信处理器/MODBUS,添加MB_COMM_LOAD和MB_MASTER。

图3-7
在弹出的调用选项中,定义一个背景数据块。

图3-8
使用同样的方法,再加入一个MB_MASTER模块,同样定义背景数据块。

图3-9
分别按照图3-10、图3-11设置MB_COMM_LOAD和MB_MASTER模块。

图3-10
图3-11
其中,MB_COMM_LOAD与MB_MASTER指令的参数说明,请参考表3-1,表3-2。
表3-1 MB_COMM_LOAD指令的参数
| 参数 | 声明 | 数据类型 | 存储区 | 说明 |
| REQ | Input | BOOL | I、Q、M、D、L | 在上升沿执行指令 |
| PORT | Input | UINT | I、Q、M、D、L 或常量 | 通信端口的 ID: 在设备组态中插入通信模块后,端口 ID 就会显示在 PORT 框连接的下拉列表中。 也可以在变量表的“常量” (Constants) 选项卡中引用该常量。 |
| BAUD | Input | UDINT | I、Q、M、D、L 或常量 | 波特率选择: 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 76800, 115200 所有其它值均无效。 |
| PARITY | Input | UINT | I、Q、M、D、L 或常量 | 奇偶校验选择: 0 – 无 1 – 奇校验 2 – 偶校验 |
| FLOW_CTRL | Input | UINT | I、Q、M、D、L 或常量 | 流控制选择: 0 –(默认值)无流控制 1 – 通过 RTS 实现的硬件流控制始终开启(不适用于 RS485 端口) 2 - 通过 RTS 切换实现硬件流控制 |
| RTS_ON_DLY | Input | UINT | I、Q、M、D、L 或常量 | RTS 延时选择: 0 -(默认值)到传送消息的*个字符之前,激活 RTS 无延时。 1 至 65535 – 到传送消息的*个字符之前,“激活 RTS”以毫秒为单位的延时(不适用于 RS-485 端口)。应用 RTS 延时必须与 FLOW_CTRL 选择无关。 |
| RTS_OFF_DLY | Input | UINT | I、Q、M、D、L 或常量 | RTS 关断延时选择: 0 –(默认值)传送后一个字符到“取消激活 RTS”之间没有延时。 1 至 65535 – 在发送消息的后一个字符到“取消激活 RTS”之间以毫秒为单位的延时(不适用于 RS-485 端口)。应用 RTS 延时必须与 FLOW_CTRL 选择无关。 |
| RESP_TO | Input | UINT | I、Q、M、D、L 或常量 | 响应超时: “MB_MASTER”允许等待从站响应的时间(毫秒) 如果从站在此时间内没有响应,则“MB_MASTER”将重复该请求,或者在发送了数目的重试后终止请求并返回错误。 5 ms 至 65535 ms(默认值 = 1000 ms)。 |
| MB_DB | Input | VARIANT | D | “MB_MASTER”或“MB_SLAVE”指令的背景数据块的引用。 在程序中插入“MB_SLAVE”或“MB_MASTER”之后,数据块标识符会显示在 MB_DB 框连接的下拉列表中。 |
| DONE | Output | BOOL | I、Q、M、D、L | 指令的执行已完成且未出错。 |
| ERROR | Output | BOOL | I、Q、M、D、L | 错误: 0 – 未检测到错误 1 – 表示检测到错误。 在参数 STATUS 中输出错误代码。 |
| STATUS | Output | WORD | I、Q、M、D、L | 端口组态错误代码 |
表3-2 MB_MASTER指令的参数
| 参数 | 声明 | 数据类型 | 存储区 | 说明 |
| REQ | Input | BOOL | I、Q、M、D、L | 请求输入: 0 – 无请求 1 – 请求将数据发送到 Modbus 从站 |
| MB_ADDR | Input | UINT | I、Q、M、D、L 或常量 | Modbus RTU 站地址: 默认地址范围: 0 至 247 扩展地址范围: 0 至 65535 值“0”已预留,用于将消息广播到所有 Modbus 从站。 只有 Modbus 功能代码 05、06、15 和 16 支持广播。 |
| MODE | Input | USINT | I、Q、M、D、L 或常量 | 模式选择: 请求类型: 读取、写入或诊断: 有关详细信息,请参见 Modbus 功能表。 |
| DATA_ADDR | Input | UDINT | I、Q、M、D、L 或常量 | 从站中的起始地址: Modbus 从站中将供访问的数据的起始地址。 可在 Modbus 功能表中找到有效地址。 |
| DATA_LEN | Input | UINT | I、Q、M、D、L 或常量 | 数据长度: 要在该请求中访问的位数或字数。 可在 Modbus 功能表中找到有效长度。 |
| DATA_PTR | Input | VARIANT | M、D | 指向 CPU 的数据块或位存储器地址,从该位置读取数据或向其写入数据。 对于数据块,必须使用“标准 - 与 S7-300/400 兼容”访问类型进行创建。 |
| DONE | Output | BOOL | I、Q、M、D、L | 0: 事务未完成 1: 事务完成,且无任何错误 |
| BUSY | Output | BOOL | I、Q、M、D、L | 0: 当前没有“MB_MASTER”事务正在处理中 1: "MB_MASTER" 事务正在处理中 |
| ERROR | Output | BOOL | I、Q、M、D、L | 0: 无错误 1: 出错,错误代码由参数 STATUS 来指示 |
| STATUS | Output | WORD | I、Q、M、D、L | 执行条件代码 |
3.4 下载
编译,确认无误后,点击下载。在弹出的“扩展的下载到设备”中,选择PG/PC接口类型,以及PG/PC接口。选择设备,并点击下载。

图3-12
在弹出的下载预览中,查看将要覆盖的内容,选择统一下载,并点击下载。

图3-13
3.5 监视
点击转到在线,并点击启动监视,此时即可通过PLC给变频器进行MODBUS通信。

图3-14
4 MODBUS通信控制变频器
4.1 使用MODBUS通信控制变频器启停
如下图所示,打开Tag_1,使能MB_MASTER。使能完成之后,关闭Tag_1。

图4-1
如图4-2,将MODE改为1(即写入数据),DATA_ADDR写入40101(主设定值寄存器号),DATA_PTR写入1000(给定值的写入值)。然后REQ使用一个脉冲沿来发送给定值。此时,变频器的给定值已经改为1000。
然后将DATA_ADDR写入40100(控制字寄存器号),DATA_PTR写入047E(停车),然后REQ使用一个脉冲沿来发送停车命令。再将DATA_ADDR写入40100(控制字寄存器号),DATA_PTR写入047F(启动),然后REQ使用一个脉冲沿来发送启动命令。

图4-2
注意:
MB_COMM_LOAD使能完成之后,一定要将Tag_1关闭,否则MB_MASTER模块将无法使用。
变频器启动位需要一个上升沿,所以先给其停车命令,然后发送启动命令,利用上升沿来启动变频器。
4.2 使用MODBUS通信修改和查看变频器参数
现在,以参数P1120加速时间为例,对参数的修改和查看进行讲解。
首先,进行读参数的演示。将MODE输入改为0(即读参数模式),将DATA_ADDR中写入40322(即加速时间的寄存器号),然后REQ使用脉冲沿来发送一个读请求。此时,可以接收到参数P1120中的数据位1000(即加速时间为10s)。

图4-3
然后进行写参数:将MODE输入改为1(即写参数模式),将DATA_ADDR中写入40322(即加速时间的寄存器号),在DATA_PTR中写入500,然后REQ使用脉冲沿来发送一个写请求。此时,已经将500写入了参数P1120之中,加速时间改为5s。

图4-4
控制单元中的 Modbus 寄存器和对应的参数如下表所示:
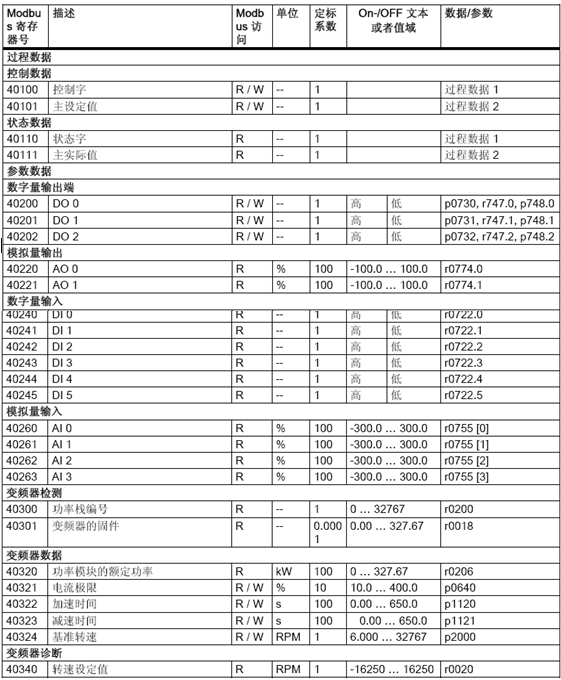

表4-1 Modbus 寄存器和对应的参数
其他推荐产品
更多产品-
面议
-
面议
-
面议
-
面议
-
面议