 您好, 欢迎来到化工仪器网
您好, 欢迎来到化工仪器网










| 电动机功率 | 3kW | 外形尺寸 | 5mm |
|---|---|---|---|
| 重量 | 5kg |
全新的西门子S7-200SMART带来两种不同类型的CPU 模块,标准型和经济型,*满足不同行业、不同客户、不同设备的各种需求。标准型作为可扩展CPU 模块,可满足对I/O 规模有较大需求,逻辑控制较为复杂的应用;而经济型CPU 模块直接通过单机本体满足相对简单的控制需求。
 |
| 参考价 | ¥366 |
| 订货量 | 1 |
更新时间:2019-05-13 15:01:25浏览次数:453
联系我们时请说明是化工仪器网上看到的信息,谢谢!
 |
 |
 |
|
 |

概述
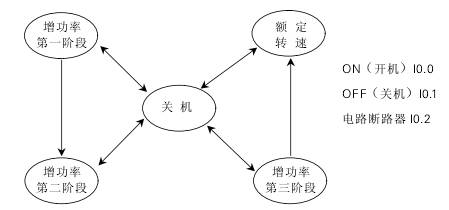
这个示例程序说明了4级线绕转子三相异步电动机的自动起动过程。电动机起动时转子为满电阻。经过一定时问后,*个转子触点闭合并短接部分转子电阻。又经过一定时问后,后续触点逐步受到控制,而转子电阻每次都减小自至其*短接,终电动机以额定转速运行。
按接在输入端I0.0的点动开关ON即可开始平稳地启动电机。再按接在输入端I0.1的点动开关OFF即可停比电机。电机电路断路器接在输入端I0.2,当电机过载时输入端I0.2打开,电机停止。
例图

程序框图
程序和注释
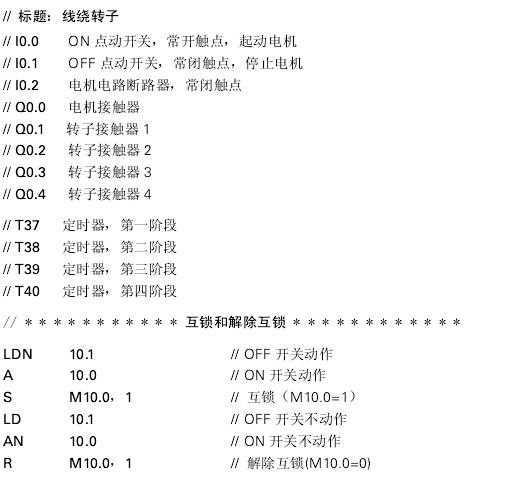
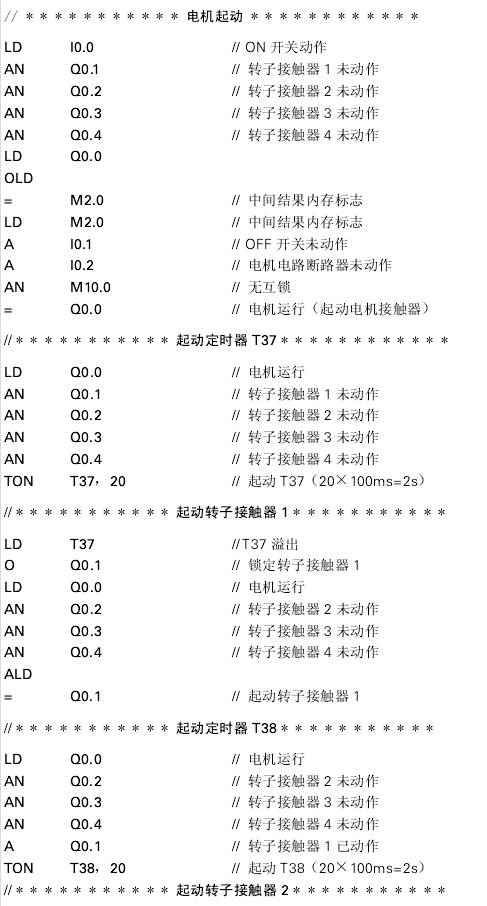
下述两种情况之一,可将中问结果内存标志位M 2.0置位:一种是按接在输入端I0.0的点动开关ON,并且4个转子接触器都未被激活;另一种是电机接触器己动作(Q0.0=1)}这是为了锁定起动。这个中问结果内存标志位用来设置电机接触器内存标志位Q0.0(运行电机),另外还必须同时满足3个条件:OFF点动开关未动作,电机电路断路器未动作,无互锁。当ON和OFF点动开关同时动作时,将互锁内存标志位M10.0置位,自到这两个点动开关重新回到初始位置,才能将互锁内存标复位。
当控制电泪L接触器的输出Q0.0被置位后,*个定时器T37开始计时,2秒钟后,控制*个转子接触器的输出QO门被置位。然后第二个定时器T38起动,又过2秒钟后,控制第二个转子接触器的输出Q0.2被置位。T39和T40重复上述步骤,它们靠设置相应的输出Q0.3和Q0.4来分别起动转子接触器3和4。这样,电机终按额定转速旋转。当输入I0.1和10.2小再有任何电压时,也就是OFF点动开关打开或电机电路断路器打开时,电机关闭。
1、串联电路块的并联连接指令OLD
两个或两个以上的接点串联连接的电路叫串联电路块。串联电路块并联连接时,分支开始用LD、LDN指令,分支结束用OLD指令。OLD指令与后述的ALD指令均为无目标元件指令,而两条无目标元件指令的步长都为一个程序步。OLD有时也简称或块指令。
2、并联电路的串联连接指令ALD
两个或两个以上接点并联电路称为并联电路块,分支电路并联电路块与前面电路串联连接时,使用ALD指令。分支的起点用LD、LDN指令,并联电路结束后,使用ALD指令与前面电路串联。ALD指令也简称与块指令,ALD也是无操作目标元件,是一个程序步指令。
3、输出指令 =
1、= 输出指令是将继电器、定时器、计数器等的线圈与梯形图右边的母线直接连接,线圈的右边不允许有触点,在编程中,触点以重复使用,且类型和数量不受限制。
4、置位与复位指令S、R
S为置位指令,使动作保持;R为复位指令,使操作保持复位。从的位置开始的N个点的寄存器都被置位或复位,N=1~255如果被复位的是定时器位或计数器位,将清除定时器或计数器的当前值。
5、跳变触点EU,ED
正跳变触点检测到一次正跳变(触点的入信号由0到1)时,或负跳变触点检测到一次负跳变(触点的入信号由1到0)时,触点接通到一个扫描周期.正/负跳变的符号为EU和ED,他们没有操作数,触点符号中间的”P”和”N”分别表示正跳变和负跳变
6、空操作指令NOP
NOP指令是一条无动作、无目标元件的一个序步指令。空操作指令使该步序为空操作。用NOP指令可替代已写入指令,可以改变电路。在程序中加入NOP指令,在改动或追加程序时可以减少步序号的改变。
7、程序结束指令END
END是一条无目标元件的一序步指令。PLC反复进行输入处理、程序运算、输出处理,在程序的后写入END指令,表示程序结束,直接进行输出处理。在程序调试过程中,可以按段插入END指令,可以按顺序扩大对各程序段动作的检查。采用END指令将程序划分为若干段,在确认处于前面电路块的动作正确无误之后,依次删去END指令。要注意的是在执行END指令时,也刷新监视时钟。
 |