您好, 欢迎来到化工仪器网
您好, 欢迎来到化工仪器网










| 电动机功率 | 3kW | 外形尺寸 | 4mm |
|---|---|---|---|
| 重量 | 3kg |
西门子S7-1500PLC 控制器产品系列中具有较大容量程序及数据存储器的 CPU,适用于具有较高程序范围和联网要求的苛刻应用。具有*处理速度,适用于二进制和浮点运算。用于系列机器、机器以及工厂中的跨领域自动化任务,在具有集中式和分布式 I/O 的生产线上作为集中式控制器使用。
 |
| 参考价 | ¥358 |
| 订货量 | 1 |
更新时间:2019-04-26 15:12:37浏览次数:296
联系我们时请说明是化工仪器网上看到的信息,谢谢!
 |
 |
 |
 |
 |

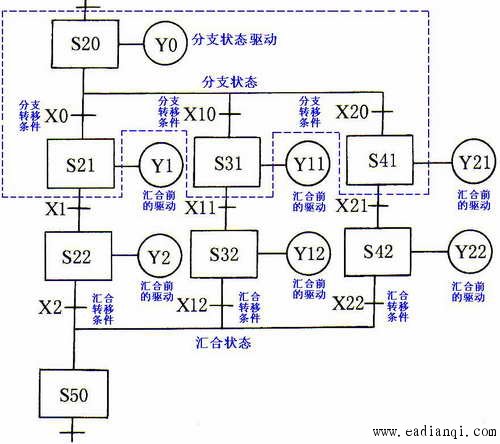
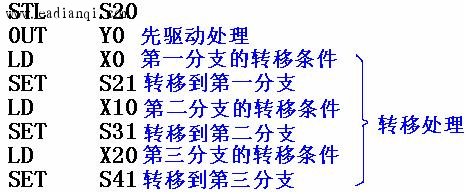
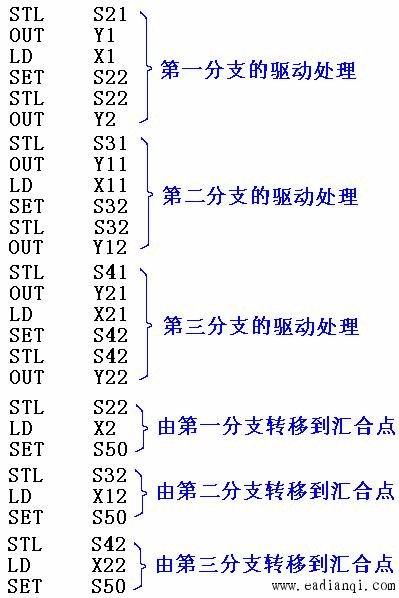
一、选择性流程程序的特点 选择性流程程序:由两个及以上的分支程序组成的,但只能从中选择一个分支执行的程序,称为选择性流程程序。 选择性流程程序的结构形式 1.从3个流程中选择执行哪一个流程由转移条件X0、X10、X20决定; 2.分支转移条件X0、X10、X20不
| 一、选择性流程程序的特点 选择性流程程序:由两个及以上的分支程序组成的,但只能从中选择一个分支执行的程序,称为选择性流程程序。
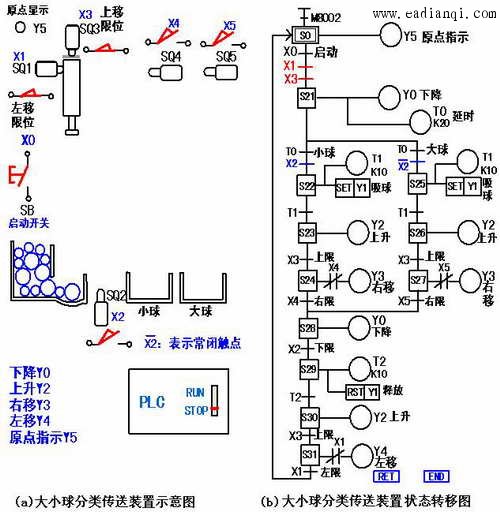
根据控制要求,电动机的正反转控制是一个具有两个分支的选择性流程. 分支转移的条件是正转起动按钮SBl(Xl)和反转起动按钮SB2(X2). 汇合的条件是热继电器FR(X3)或停止按钮SB3(X0). 初始状态S0可由初始脉冲M8002来驱动,其状态转移图如图7-13(a)所示。 (3)指令表 根据下图(a)所示的状态转移图,其指令表如下图(b)所示。 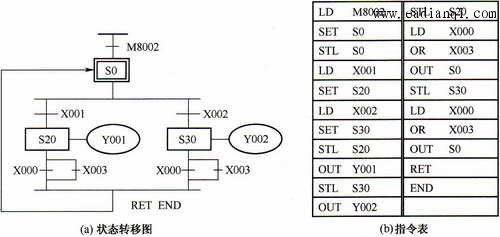 电动机正反转控制的状态转移图和指令表 例2 用步进指令设计一个将大、小球分类选择传送装置的控制程序 控制要求如下:如下图(a)所示,左上为原点,机械臂下降(当碰铁压着的是大球时,机械臂未达到下限,限位开关SQ2不动作,而压着的是小球时,机械臂达到下限,SQ2动作,这样可判断是大球还是小球)。然后机械臂将球吸住,机械臂上升,上升至SQ3动作,再右行到SQ5(若是大球)或SQ4(若是小球)动作,机械臂下降,下降至SQ2动作,将球释放,再上升至SQ3动作,然后左移至SQ1动作到原点。 Y4:左移 Y3:右移 Y2:上升 Y0:下降 Y1:吸球 (1)I/O分配 X0:启动按钮,Xl:SQ1(左限位开关), X2:SQ2(下限位开关),X3:SQ3(上限位开关),X4:SQ4(右限位开关),X5:SQ5(右限位开关); Y0:下降,Y1:吸球,Y2:上升,Y3:右移,Y4:左移 (2)状态转移图 根据工艺要求,该控制流程根据吸住的是大球还是小球有两个分支,且属于选择性分支。分支在机械臂下降之后根据下限开关SQ2的是否动作可判断是大球还是小球,分别将球吸住、上升、右行到SQ4(小球位置X004动作)或SQ5(大球位置X005动作)处下降,然后再释放、上升、左移到原点。 其状态转移图如下图(b)所示。在下图(b)中有两个分支,若吸住的是小球,则X002为ON,执行左侧流程;若为大球,X002为OFF,执行右侧流程。
|
河北西门子S7-1500PLC模块代理(合作伙伴)
 |