您好, 欢迎来到化工仪器网
您好, 欢迎来到化工仪器网










| 电动机功率 | 4kW | 外形尺寸 | 3mm |
|---|---|---|---|
| 重量 | 4kg |
西门子S7-1500PLC 控制器产品系列中具有较大容量程序及数据存储器的 CPU,适用于具有较高程序范围和联网要求的苛刻应用。具有*处理速度,适用于二进制和浮点运算。用于系列机器、机器以及工厂中的跨领域自动化任务,在具有集中式和分布式 I/O 的生产线上作为集中式控制器使用。
 |
| 参考价 | ¥322 |
| 订货量 | 1 |
更新时间:2019-04-26 14:08:32浏览次数:255
联系我们时请说明是化工仪器网上看到的信息,谢谢!
 |
 |
 |
 |
 |

直接根据功能表图的原理研制PLC,即将功能表图作为一种编程语言直接使用,目前已有此类产品,多数应用在大、中型PLC上,其编程主要通过CRT终端,直接使用功能表图输入控制要求。 用功能表图说明PLC所要完成的控制功能,然后再据此找出逻辑关系并画出梯形图。
直接根据功能表图的原理研制PLC,即将功能表图作为一种编程语言直接使用,目前已有此类产品,多数应用在大、中型PLC上,其编程主要通过CRT终端,直接使用功能表图输入控制要求。 用功能表图说明PLC所要完成的控制功能,然后再据此找出逻辑关系并画出梯形图。这种应用法较多,本节主要讨论这种方。 功能表图的基本概念 功能表图是一种描述顺序控制系统过程、功能和特性的图形表示方法。主要由步、转移,有向线等元素组成。
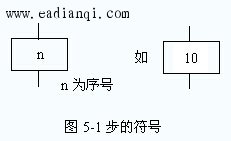
步 步是控制系统中一相对不变的状态,在功能表图中,步通常表示某个或某些执行元件的状态,其符号见图5-1。步又分成起始步、动步、静步。 1.起始步: 起始步对应于控制系统的初始状态,是系统运行的起点。一个控制系统至少要有1个起始步,起始步的符号见图5-2
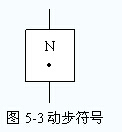
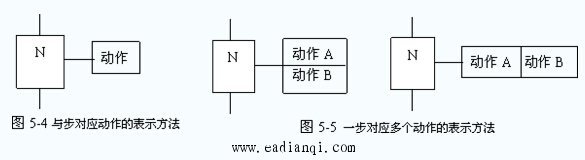
2.动步、静步 静步是指控制系统当前没有运行的步。 动步是指控制系统当前正在运行的步。 动步用1个小黑点放在步的方框图中表示,见图5-3。 动步、静步是系统分析时用的术语,平时进行程设时并不用。 3.步对应的动作 步是一个稳定的状态,表示过程中的一个动作。在该步的右边用1个矩形框表示,见图5-4,当一个步对应多个动作时,可用图5-5表示。
有向线和转移 有向线 在控制系统中动步是变化的,会向前转移的,转移的方向是按有向线规定的路线进行,习惯上是从上到下、由左至右;如不是上述方向,应在有向线上用箭头标明转移方向。 必要时为了便于理解也可加箭头。
转移条件 动步的转移是有条件的,转移条件在有向线上划一短横线表示,见图5-6,横线旁边注明转移条件。 若同一级步都是动步,且该步后的转移条件满足,则实现转移,即后一静步变为动步,原来的动步变为静步 |
PLC控制系统与继电器控制系统相比,有许多相似之处,也有许多不同。不同之处主要在以下几个方面: (1)从控制方法上看,电器控制系统控制逻辑采用硬件接线,利用继电器机械触点的串联或井联等组合成控制逻辑,其连线多且复杂、体积大、功耗大,系统构成后,想
PLC控制系统与继电器控制系统相比,有许多相似之处,也有许多不同。不同之处主要在以下几个方面: (3)从控制速度上看,继电器控制系统依靠机械触点的动作以实现控制,工作孩率低.机械触点还会出现抖动问题。而PLC通过程序指令控制半导体电路来实现控制,速度快,程序指令执行时间在微秒级,且不会出现触点抖动间题。 (4)从定时和计数控制上看,电器控制系统采用时间继电器的延时动作进行时间控制,时间继电器的延时时间易受环境谧度和沮度变化的形响,定时精度不高。而PLC采用半导体集成电路作定时器,时钟脉冲由晶体振荡器产生,精度高,定时范围宽。用户可根据需要在程序中设定定时值,修改方便,不受环境的形响,且PLC具有计致功能,而电器控制系统一般不具备计数功能。 (5)从可靠性和可维护性上肴,由于电器控制系统使用了大盆的机械触点,其存在机械磨损、电弧烧伤等,寿命短,系统的连线多,所以可靠性和可维护性较差。而PIZ大量的开关动作由无触点的半导体电路完成,其寿命长、可靠性高,PLC还具有自诊断功能,能查出自身的故障,随时显示给操作人员,并能动态地监视控制程序的执行情况,为现场调试和维护提供了方便。 |
天津西门子S7-1500PLC模块代理(合作伙伴)
 |
 |
|
 |