 化工仪器网
化工仪器网










详细介绍
西门子S7-400模块代理商
《销售态度》:质量保证、诚信服务、及时到位!
《销售宗旨》:为客户创造价值是我们永远追求的目标!
《服务说明》:现货配送至全国各地含税(13%)含运费!
《产品质量》:原装产品,*!
《产品优势》:专业销售 薄利多销 信誉好,口碑好,价格低,货期短,大量现货,服务周到!
1 路径插补功能简介
1.1 基本概念
插补的概念源于数控机床。在数控机床中,刀具不能严格地按照要求加工的曲线(直线)运动,只能用折线轨迹逼近所要加工的曲线。机床数控系统依照一定方法确定刀具运动轨迹的过程,叫做插补。也可以说,已知曲线上的某些数据,按照某种算法计算已知点之间的中间点的方法,或者称为“数据点的密化”。插补的动作过程:在每个插补周期(极短时间,一般为毫秒级)内,根据指令、进给速度计算出一个微小直线段的数据,刀具沿着微小直线段运动,经过若干个插补周期后,刀具从起点运动到终点,完成轮廓的加工。
路径运动初来自于机器人和CNC领域,用机器人编程语言或G-Code编程。它是指在多维空间中,通过一组轴的协作动作,各轴之间无主从之分,它们按照设定的动态响应特性,实现路径对象从起点到终点的的路径轨迹运动。
路径插补产生路径的运行轨迹,计算插补周期内的路径插补点,并通过机械运动系统转换获得对应插补周期内插补点的各路径轴设定值。
隶属于机械运动系统的单独轴在S7 technology中被为路径轴,路径轴通过路径对象执行路径运动。参考图1 路径轴与路径对象。
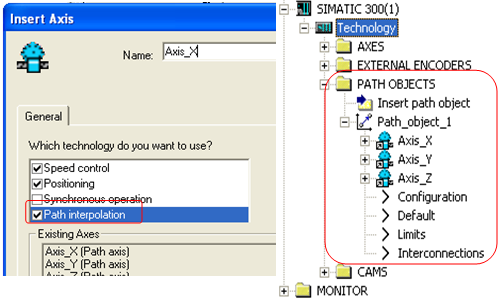
图1 路径轴与路径对象
1.2 S7-Technology 路径功能特点
S7-Technology 路径插补功能概述:
> 从S7-Technology V4.2开始
> 允许进行3轴插补操作
> 路径插补可以通过直线、圆弧、多项式表示实现
> Move Path命令可以组成连续运动
> 支持多种机械运动学模型
> 可以与外部位置值同步,实现传送带跟踪功能
S7-Technology 路径插补的技术特点:
> 所有的路径轴都相互同步移动
> 所有的路径轴都同时到达目标位置
> 路径轨迹的移动,将会始终是以一个固定的合成速度进行 (如果动态
特性限制没有被超越)
> 低速度性能的轴,决定了整个轨迹的高动态特性
路径差补可以执行多3轴之间的2D或者3D的线性、圆弧或者多项式插补,路径差补工艺对象(TO) ,适用于机械运动学控制范畴,一个共同的系统中,可以存在多个机械运动学控制结构。同步于路径轴的“同步轴”,仍然可以实现同步控制,例如,旋转,凸轮开关,测量功能。通过图形化编辑器,可以简便地设置机械运动学控制系统的参数;通过动态特性轮廓窗口,可以轻松定义路径的动态特性;通过轨迹点表格,可以轻松定义路径差补,计划目的地路径。另外还可以定义保护防撞区域和实现传送带位置的精确跟踪。
1.3 机械运动系统的选择
T-CPU 所实现运动学,等同于人们过去所熟悉机械运动学。可以将它们分为如下两种不同的类型。参考图2 在 T-CPU 中集成的机械运动学。
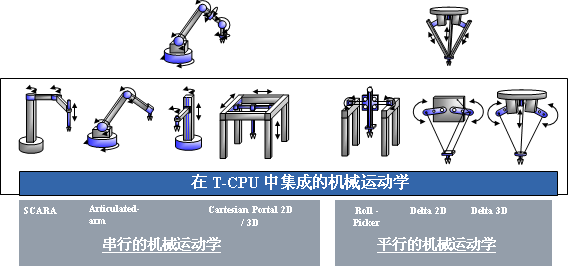
图2 在 T-CPU 中集成的机械运动学
不同的机械运动系统可以实现TCP (Tool Center Point,工具中心点或机械运动端点)相同的路径运动功能。尽管在某些情况下,不同的机械运动系统可实现相同的路径运动,但是,如果机械运动系统选择不合理,将有可能无法完成的路径功能。所以,必须根据实际的工艺需求选择合适的机械运动系统,并在工厂布局中考虑该机构的的合理安装位置。参考图3 不同机械系统的转化。
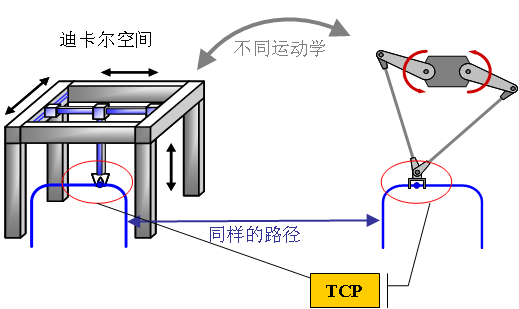
图3 不同机械系统的转化
2 路径插补的实现方法
2.1 运动学模型简介
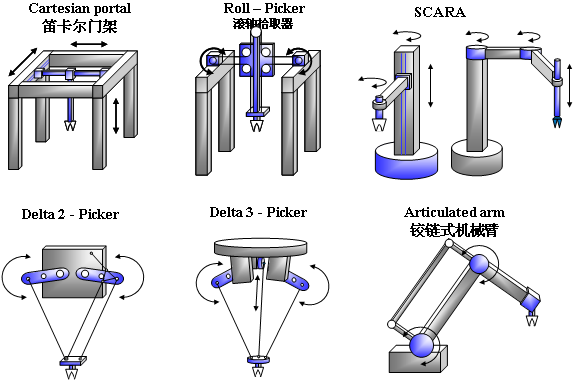
常用的运动学模型请参考图 4 运动学模型。
 西门子S7-400模块代理商
西门子S7-400模块代理商
图 4 运动学模型
下面介绍一些常用的运动学模型。直角坐标机器人 (英文名:Cartesian coordinate robot),大型的直角坐标机器人也称桁架机器人或龙门式机器人,由多个运动自由度建成空间直角关系的、多用途的操作机器。工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。因末端操作工具的不同,直角坐标机器人可以非常方便的用作各种自动化设备,完成如焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂等一系列工作。参考图5 直角坐标机器人。
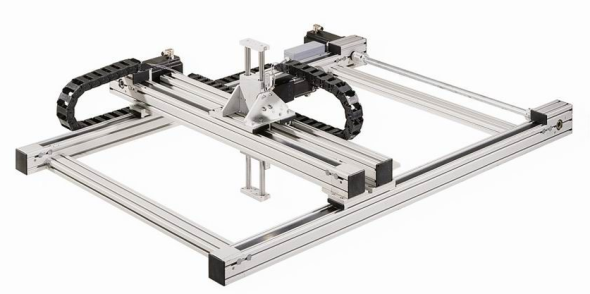
图5 直角坐标机器人
SCARA 机器人(Selective Compliance Assembly Robot Arm)是一种圆柱坐标型的特殊工业机器人。有3个旋转关节,其轴线相互平行,在平面内进行定位,另一个关节是移动关节,用于完成机械末端在垂直平面的运动。SCARA机器人在x,y方向上具有良好的顺从性、灵活性,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作。SCARA机器人广泛应用于塑料工业、汽车工业、电子产品工业、药品工业和食品工业等领域。它的主要职能是搬取零件和装配工作。 参考图6 SCARA 机器人。
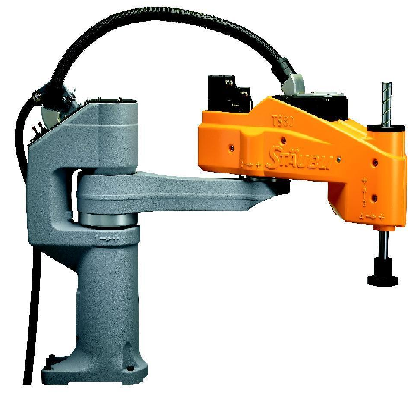
图6 SCARA 机器人
铰链型机械臂:有很高的自由度,可以多至5~6轴,适合于几乎任何轨迹或角度的工作,可以自由编程,完成全自动化的工作, 提高生产效率;可以代替很多不适合人力完成、有害身体健康的复杂工作,比如,汽车外壳点焊。参考图 7 铰链型机械臂。

图7铰链型机械臂
Delta 3D机器人:外形酷似一只蜘蛛,这种*的几何结构赋予了它们质量轻,强度大,轻便灵活,节省空间,高速,敏捷;适用于高速分拣。参考图8 Delta 3D机器人。

图8 Delta 3D机器人
2.2 路径插补实现方法
首先需要做轴的定义,选择“Path interploation”。参考图 9 路径轴的定义。
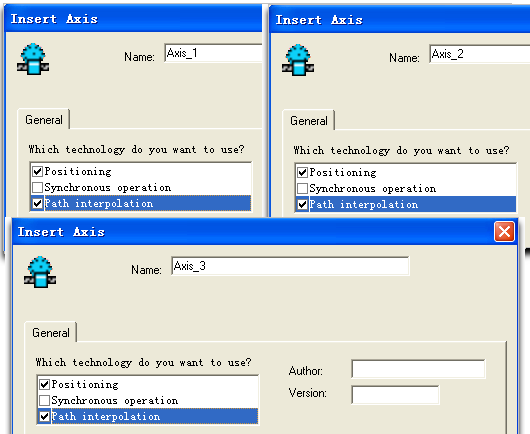
图9 路径轴的定义
1. IPC 分类及介绍
IPC 分类
SIMATIC IPC 包含以下类型:
1.SIMATIC Rack PC(机架式 PC)
灵活、高性能的工业 PC,用于安装在 19" 机架上
2.SIMATIC Box PC(箱式 PC)
小型紧凑而强固的工业 PC,用于标准安装
3.SIMATIC Panel PC(平板式 PC)
强固、高性能的工业 PC,具有绚丽的显示器
1.1 SIMATIC Rack PC(机架式 PC)简介

图1
SIMATIC Rack PC (机架式 PC)
灵活的工业 PC,适于安装在 19 英寸控制柜内
SIMATIC Rack PC(机架式 PC)能够提供灵活、高可用性的工业 PC 系统,用于需要 19" 规格、功能强体积小的应用。
针对不同的需求,设备目前(截至07/2009)分为:
- SIMATIC 机架式 PC 547B - 采用 Intel Core 2 Duo 技术,以具有吸引力的价格提供*性能
- SIMATIC 机架式 PC 647B - 采用 Intel Core 2 Duo 技术,结构极为紧凑,具有优异的工业功能
- SIMATIC 机架式 PC 847B - 采用 Intel Core 2 Duo 技术,具有*的可扩展性和优异的工业功能
- SIMATIC 机架式 IPC 547C – 采用 Intel Core 2 Duo 技术,可选用SSD (固态驱动器)以获得更高的稳定性
1.2 SIMATIC Box PC(箱式 PC)简介

图2
SIMATIC Box PC (箱式 PC)
适合于安装在机器、控制柜及控制台中。由于它们的尺寸小,所以可以集成在空间有限的地方。
SIMATIC Box PC (SIMATIC 箱式 PC)能够为机械工程师、工厂工程师和控制箱制造商提供极其强固的工业 PC,用于要求功能强大而体积紧凑的应用。
针对不同的需求,设备目前(截至07/2009)可分为:
- SIMATIC Microbox PC 427B – 超紧凑、免维护型:灵活的嵌入式工业 PC
- SIMATIC 箱式 PC 627B – 在有限的空间里提供优秀的性能/采用 Intel Core 2 Duo 技术
- SIMATIC 箱式 PC 827B – 高性能,高灵活性/使用 Intel Core 2 Duo 技术
- SIMATIC IPC 427C
1.3 SIMATIC Panel PC(平板式 PC)简介

图3
籍于其较高的工业兼容性,SIMATIC Panel PC 适用于标准控制机柜、控制台,操作面板或直接应用于机器。典型应用于生产自动化和过程自动化。
针对不同的需求,可使用丰富的坚固、高性能 SIMATIC Panel PC,设备目前(截至07/2009)可分为:
- SIMATIC Panel PC 477B embedded – 采用嵌入式技术的 Panel PC,结构极其紧凑、坚固,免维护
- SIMATIC 面板型 PC 577B – 工业功能和开放性,价格十分吸引人
- SIMATIC 面板型 PC 677B – 灵活、紧凑,可提供高的性能
- SIMATIC IPC 477C
- SIMATIC IPC 577C
 化工仪器网
化工仪器网