 化工仪器网
化工仪器网










详细介绍
西门子6RA7093-4GS22-0
6RA7093-4GS22-0
SIMOREG DC Master 整流器 带微处理器 针对单象限驱动 电路 B6C 输入:575V 三相交流,1326A 可操控:励磁整流器 D690/1600 MRE-GEEF4S22 输出:690V DC,1600A 输出端 US 等级:690V DC, 1190A 现场输入端 460V 输出端 375V,40A
6RA70在实际应用中往往需要两组命令对装置实现两地操作控制,类似这类问题可以归纳为数据组进行切换,如果已经激活了S00 软件,也可以使用自由功能块转换开关进行切换。
1数据组实现两地操作的参数设置
1.1 命令数据组的切换
6RA70装置中命令数据组只有两种组合形式,命令数据组参数一个显着的标记,在参数表描述中在参数的下方有BDS字样或在功能图中,参数的后面紧跟着.B,如P654.B,或者在drivemonitor参数表中有BiCo字样,如下图1

图1
在这里需要说明一下,命令数据组参数有些参数的两个子参数的默认值并不相同,如果此时需要两个命令数据组切换后控制逻辑保持相同,一般需要进行命令数据组复制。
具体操作如下:

图2
如果把命令参数组1的值拷贝到参数组2,设置P057=112即可。复制完成后P057=0012。
1.2 功能数据组的切换
由于在6RA70装置中,设定点的源属于功能数据组的范畴,所以在实现就地/远程切换时,命令切换的同时,设定点的源也要同时进行切换。

图3
如果把功能参数组1的值拷贝到参数组2,设置P055=112即可。复制完成后P055=0012。
1.3数据组参数设置步骤
下面假设两个条件进行参数设置:
A.通过端子36进行合分闸控制,端子39作为就地/远程切换,模拟量输入通道1作为速度给定
B. 通过profibus-DP通讯进行控制
说明:

图4
端子36对应B0010
端子39对应B0016

图5
模拟输入通道1对应的连接器为K0011
Profibus-DP通讯*个通道为控制字(K3001),第二个通道为速度给定(K3002)
控制字K3001可以分解为位的形式:B3100…….B3115.
6RA70的37和38端子为外部的合闸和使能端子,在任何情况下,端子37和38都参与控制,也就是说无论内部参数怎样设置,如果使用内部参数启动和合闸时,外部的端子37和38 都必须为高电平。
参数设置如下:
P654.1=10 启动指令
P433.1=11 速度设定通道
P690=16 命令数据组切换指令 端子36作为切换
P676.01=16 功能数据组切换指令 端子36作为切换
P057=112 命令数据组复制
P055=112 功能数据组复制
P654.2=3100
P433.2=3002
2自由功能块实现两地操作的参数设置
如果要想通过自由功能块实现远程/就地操作,首先要购买S00软件的授权,没有授权不能长时间使用S00 软件,临时只有500小时。S00软件激活的标志就是n978=2000。通过自由功能块实现远程/就地操作,主要是应用模拟信号转换开关和数字转换开关。
同样采用1.3节的两种假设。
2.1 模拟信号转换

图6
参数设置:
U241=16
U240.01=11
U240.02=3002
P433.01=9210
或者可以使用连接器选择开关,见功能图G124

图7
参数设置:
P456.01=16
P455.01=11
P455.02=3002
P433.01=230
2.2数字信号切换
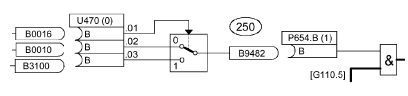
图8
参数设置:
U470.01=16
U470.02=10
U470.03=3100
P654.01=9482
一. peer-to-peer 通讯
首先,介绍以下peer-to-peer 通讯:根据不同的应用形式分为三类:以X172 接口为例:
1. 串行连接

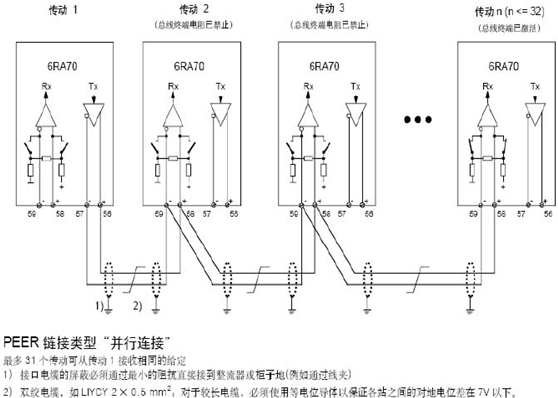
2.并行连接
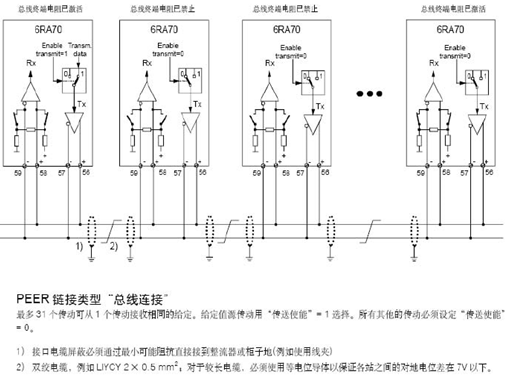
3.总线连接
4.参数设置:

二. 实际生产应用中,主从控制方式应用分两种形式:
1. 电机首尾通过法兰直接硬相连,主动装置工作在速度环工作状态,而从动装置工作在电流环(转矩环)状态,在这种方式中,一般情况下,定义远离减速机的电机作为主动电机,编码器接在主动装置所带的电机上。
从动装置通过peer-to-peer 网络接收来自主动装置发送来的电流(转矩)给定,速度实际值和控制字1。
连接简图1:
 西门子6RA7093-4GS22-0
西门子6RA7093-4GS22-0
上图是电机硬轴直接连接的主从控制的控制方式连接简图,主电路连接请参考6RA70 手册。这种方式中,主动装置工作在速度环状态,产生转矩设定值,把这个值通过peer-to -peer 网络传递给从动装置,同时,把控制字1 也传到从动装置,使得主,从动装置起停操作同时进行。这时候,从动装置上的端子 34 ,37, 38 要短接在一起。实际速度传到从动装置,主要是为了标定励磁曲线。此时,从动装置的斜坡函数发生器和速度调节器不处于激活状态。通过这种连接,从动装置与主动装置能一起向前和向后运行。
根据生产工艺要求, 在一些场合, 工作负载量很小,只需一个电机工作就可以,此时,需把从动装置上的端子34 ,37和38 要用一个开关使其使能取消,同时P082不能设置成3 , 或把从动装置主电源断掉。
参数设置:
| 主动装置 | 从动装置1…n |
| P081=1 装置弱磁运行 | P081=1 装置弱磁运行 |
| P083=2 编码器反馈 | P083=4 自由连接的速度反馈 |
| P169=0 转矩控制 | P169=0 转矩控制 |
| P170=1 转矩控制 | P170=1 转矩控制 |
P503=xx 电机-装置匹配系数  P171=xx 电机-装置匹配系数 | |
| P500=6002 来自主动装置的转矩设定点 | |
| P609=6001来自主动装置的速度实际值 | |
| P648=6003 来自主动装置的控制字 | |
| P687=1 设置从动开关 | |
| P790=5 装置对装置通讯 | P790=5 装置对装置通讯 |
| P791=3 发送字数量 | P791=3 发送字数量 |
| P793=8 波特率 | P793=8 波特率 |
| P794.01=167 实际速度 | |
| P794.02=148 转矩设定点 | |
| P794.03=30 控制字1 | |
| P795=1 终端电阻 | |
| P797=2s 报文监控时间 | P797=2s 报文监控时间 |
以上参数只是关于主从控制方面的设置,关于启动参见6RA70 手册的第7.5节的启动步骤.。
关于优化运行步骤:
(1) 主动装置的优化运行
a.打开电机和减速机之间的连接,
b.在从动装置上设定P171=0 P172 =0
c.执行P051=25 优化
d.执行P051=26优化,必要时,进行手动优化,达到使输出转速平稳,为弱磁优化做准备
e.执行P051=27优化
f. 在从动装置上恢复P171 ,P172的值
(2).从动装置的优化运行
a.把主动装置的P171, P172设置成0
b.执行P051=25 优化
c.执行P051=27 优化
d.把主动装置的P171 P172 恢复成原来的值
(3)当把电机与减速机连接以后,要设置P051=26 优化运行,调整转速达到平稳。
2. 第二种情况是应用于类似印刷行业,与*种情况基本相同,在这种情况下,电机轴的连接可以自由分开。根据电机连接轴的连接方式分为下列两种情况:
见下列简图2:

图2
控制模式1
1. 电机轴连接在一起即,Ku1闭合
图中G1为主动装置,运行在速度环状态,,G2为从动装置,运行于电流环控制,给定值通过peer-to-peer 接收主动装置的转矩给定或电流给定。在这种情况下,电机轴连接Ku1必须牢固闭合,否则,可能由于失去速度环的控制而产生超速现象。
2. 当电机轴分开运行时,即Ku1脱开
此时,主动装置G1与从动装置G2独立工作于速度环控制模式, G1 的速度给定通过模拟量(或网络),G2的速度给定通过peer-to-peer,把G1的斜坡发生器的输出给到G2的速度环的给定,同时,把G2的模拟量作为G2的速度补偿量,从而达到G1和G2的同步。
参数设置:
| 主动装置 | 从动装置1…n |
| P081=1 装置弱磁运行 | P081=1 装置弱磁运行 |
| P083=2 编码器反馈 | P083=2 编码器反馈 |
| P169=0 转矩控制 | P169=0 转矩控制 |
| P170=1 转矩控制 | P170=1 转矩控制 |
P503=xx 电机-装置匹配系数  主动电机电流 P171=xx 电机-装置匹配系数 | |
P500=6002 来自主动装置的转矩设定点 | |
| P634.01=6001来自主动装置的速度给定值 |
| P634.02=11 速度补偿 | |
| P687=10 主从动切换开关 | |
| P648=6003 来自主动装置的控制字1 | |
| P790=5 装置对装置通讯 | P790=5 装置对装置通讯 |
| P791=3 发送字数量 | P791=3 发送字数量 |
| P793=8 波特率 | P793=8 波特率 |
| P794.01=170 速度设定值 | |
| P794.02=148 转矩设定点 | |
| P794.03=30 控制字1 | |
| P795=1 终端电阻 | |
| P797=2s 报文监控时间 | P797=2s 报文监控时间 |
电机的优化运行操作:
把电机连接轴分开,分别对两个电机进行优化操作,详细操作,参考6RA70 操作手册第7.5章节。
控制模式2
当两电机轴Ku1 牢固连接时,主动装置G1和从动装置G2都工作于速度环控制,G2的速度给定同样来自G1的斜坡函数发生器的输出,但同时,要通过G2的速度补偿给定使G2的速度超前于G1装置5%,使得G2的速度环逐渐趋于饱和。把G1的速度调节器的输出通过peer-to-peer 传送到G2 作为转矩限幅,使得G2和G1的输出转矩相等。如果突然电机连接轴脱开,G2的速度只能增加5% 。此时由于G2的速度环退出饱和状态而按照大于G1的给定的5%运行,不致于超速飞车。
参数设置情况:
| 主动装置 | 从动装置1…n |
| P081=1 装置弱磁运行 | P081=1 装置弱磁运行 |
| P083=2 编码器反馈 | P083=2 编码器反馈 |
| P169=0 转矩控制 | P169=0 转矩控制 |
| P170=1 转矩控制 | P170=1 转矩控制 |
P171=xx 电机-装置匹配系数  | |
P430.01=10 来自主动装置的转矩设定点开关 | |
| P430.02=11 速度补偿 | |
| P431.01=6002 来自主动装置的转矩设定点 | |
| P431.02=2 转矩限幅 | |
| P605.01=204 转矩限幅 | |
| P606.01=4 打开转矩限幅 | |
| P621=15 速度超前设定 | |
| P634.01=6001来自主动装置的速度设定点 | |
| P634.02=11速度补偿 | |
| P648=6003 来自主动装置的控制字1 | |
| P706=11 速度补偿开关 | |
| P712=5% | |
| P716=10 速度超前补偿开关 | |
| P790=5 装置对装置通讯 | P790=5 装置对装置通讯 |
| P791=3 发送字数量 | P791=3 发送字数量 |
| P793=8 波特率 | P793=8 波特率 |
| P794.01=170 速度设定值 | |
| P794.02=148 转矩设定点 | |
| P794.03=30 控制字1 | |
| P795=1 终端电阻 | |
| P797=2s 报文监控时间 | P797=2s 报文监控时间 |
电机的优化运行操作:把电机连接轴分开,分别对两个电机进行优化操作,详细操作,参考6RA70 操作手册第7.5章节
功能模板
6ES7 350-1AH03-0AE0
6ES7 350-2AH00-0AE0
6ES7 351-1AH01-0AE0
6ES7 352-1AH02-0AE0
6ES7 355-0VH10-0AE0
6ES7 355-1VH10-0AE0
6ES7 355-2CH00-0AE0
6ES7 355-2SH00-0AE0
6ES7 338-4BC01-0AB0
6ES7 352-5AH00-0AE0
6ES7 352-5AH00-7XG0
通讯模板
6ES7 340-1AH02-0AE0
6ES7 340-1BH02-0AE0
6ES7 340-1CH02-0AE0
6ES7 341-1AH01-0AE0
6ES7 341-1BH01-0AE0
6ES7 341-1CH01-0AE0
6ES7 870-1AA01-0YA0
6ES7 870-1AB01-0YA0
6ES7 902-1AB00-0AA0
6ES7 902-1AC00-0AA0
6ES7 902-1AD00-0AA0
6ES7 902-2AB00-0AA0
6ES7 902-2AC00-0AA0
6ES7 902-2AG00-0AA0
6ES7 902-3AB00-0AA0
6ES7 902-3AC00-0AA0
6ES7 902-3AG00-0AA0
6GK7 342-5DA02-0XE0
6GK7 342-5DF00-0XE0
6GK7 343-5FA01-0XE0
6GK7 343-1EX30-0XE0
6GK7 343-1EX21-0XE0
6GK7 343-1CX00-0XE0
6GK7 343-1CX10-0XE0
6GK7 343-1GX20-0XE0
6GK7 343-1GX21-0XE0
6GK7 343-1HX00-0XE0
6GK7 343-2AH00-0XA0
6ES7971-1AA00-0AA0
6ES7971-5BB00-0AA0
6ES7314-6EH04-0AB0
6GF30200AC400AC0
6GF30200AC400AC1
6GF30200AC400AC3
6GF30200AC400AC4
6GF30200AC400AC5
6GF30200AC400AP1
6GF30200AC400AP2
6GF33200AC02
6GF33200AC03
6GF33200AC07
6GF33200HT01
6GF33250AC03
6GF33250AC07
6GF33250HT01
6GF33400HT01
6GF34000AP01
6GF34000AP02
6GF34000AP03
6GF34000BH15
6GF34000LT017BA1
6GF34000LT018DA1
6GF34000TP03
6GF34001BH20
6GF34200AA20
6GF34200AA40
6GF34200AX20
6GF34200AX40
6GF34200AC000LK0
6GF34200AC001AA0
6GF34200AC001LK0
6GF34200AC001LT0
6GF34200AC001PS0
6GF34200AC002AA0
6GF34200AC002CB0
6GF34200AC002LT0
6GF34200AC003LT0
6GF34000SL01
6GF34001SL01
6GF34000SL02
6GF34000SL03
6GF34401CD10
 化工仪器网
化工仪器网