 化工仪器网
化工仪器网










详细介绍
西门子S7-1200代理
上海盟疆有限公司工业业务领域致力于为客户提供高品质的服务,追求客户的满意是我们始终如
一的目标。在中国,工业业务领域拥有一支技术过硬、经验丰富的工程师队伍,为客户提供7x24小时全天
候服务。专业的服务人员和遍布全国的服务及备件网络将对客户的服务需求迅速作出响应,将由设备故障
引起的损失降低到小的程度。
我公司经营西门子*现货PLC;S7-200S7-300 S7-400 S7-1200 触摸屏,变频器,6FC,6SNS120 V10 V60 V80伺服数控备件:*电机(1LA7、1LG4、1LA9、1LE1),国产电机(1LG0,1LE0)大型电机(1LA8,1LA4,1PQ8)伺服电机(1PH,1PM,1FT,1FK,1FS)西门子保内*产品‘质保一年。一年内因产品质量问题免费更换新产品;不收取任何费。咨询。
追求,追求精确
要通过“严格”的检验程序,以可编程控制器(PLC)产品为例,在整个生产过程中针对该类产品的质量检测节点就超过20个。视觉检测是数字化工厂*的质量检测方法,相机会拍下产品的图像与Teamcenter数据平台中的正确图像作比对,一点小小的瑕疵都逃不过SIMATIC IT品质管理模块的“眼睛”。对比传统制造企业的人工抽检,这显然要可靠又快速得多。”
数据通讯概述
---- S7-300 具有多样的通讯方式。
- 用全局数据通讯进行联网的CPU之间数据包周期的交换
- 用通讯功能块对网络其他站点进行由事件驱动的通讯。
- 对于联网,可以使用MPI, PROFIBUS或工业以太网。
- 全局数据,通过全局数据通讯服务,联网的CPU可以相互之间周期性地交换数据。(到4gd包,每包有22字节/周期)。例如:一个CPU可以访问另一个CPU的数据、存储位和过程映象。全局数据通讯只可以通过MPI进行。在step7中的GD表中进行组态。
-通讯功能,对S7/M7/C7的通讯服务可以使用系统内部块建立起来。 - 通过MPI的标准通讯
- 扩展通讯通过MPI、K总线、PROFIBUS和工业以太网(S7-300只能作为服务器)
对于s5系列及第三方的通讯服务,可以使用非驻留块建立。 - 通过PROFIBUS和工业以太网实现S5兼容的通讯
- 通过PROFIBUS和工业以太网实现标准通讯 (第三方设备)
---- 与全局数据进行对比,必须为通讯功能建立通讯连接。
通过CP的数据通讯(点对点)
---- 用CP 340/CP 341通讯处理模块可以建立起经济而方便的点到点链。在3种通讯接口的基础上,有多种通讯协议可以使用。
- 20 mA(TTY)
- RS 232C/V.24
- RS 422/RS 485
可连接下列设备: - S7 PLC和S5 PLC及第三方系统
- 打印机
- 机器人控制
- 扫描仪、条码阅读器等
通过多点接口(MPI) 的数据通讯
---- 多点接口(MPI)通讯口集成在 S7-300 CPU上。它可以用于简单联网。
- MPI能同时连接几个带 STEP 7的编程器/PC、人机界面(HMI)
- 全局数据
联网的CPU可以利用全局数据(GD)服务,周期性地相互进行数据交换。 (每个程序周期多允许16个GD包,每包多64字节)。S7-300 cpu每次多可以交换4个含22个字节的数据包,而且多可以有16个CPU参与数据交换(用step7 v4.x以上版编程软件)。全局数据通讯只能通过MPI接口。 - 内部通讯总线(K-总线)
CPU的MPI是直接与S7-300的K总线连接。即可以用k总线接口从编程器直接通过MPI对FM/CP模块进行编址。 - 功能强大的通讯技术
- 多32个MPI站
- 每个CPU多有8个动态通
- 讯连接用于与SIMATIC S7/M7 300/ 400、C7进行标准通讯
- 每个CPU多有4个静态通讯连接用于与编程器、PC机、SIMATIC HMI系统和 SIMATIC S7/M7-300/ 400、C7进行扩展通讯 。
- 数据传输速度187.5千位/秒或12兆位/秒 - 灵活的扩展能力
用下列可靠的部件来配置MPI通讯:LAN电缆,LAN连接器和 RS 485中继器均采用PROFIBUS和"分布式 I/O"系列产品。这些部件保证了的配置。例如,在任意两个给定的MPI节点之间可串联多10个中继器来跨越长距离。
通过CP进行数据通讯(PROFIBUS或工业以太网)
---- 可通过CP 342/343通讯处理器将SIMATIC S7-300与 PROFIBUS 和工业以太网总线系统相连。
---- 可连接的包括
|
|
模板的诊断及过程监视
---- S7-300有多种输入/输出模板具有智能功能:
- 对信号进行监视 (诊断)
- 对过程信号进行监视 (过程中断)
在电网-变频器-电机-负载构成的驱动系统中,能量的传递是双向的。电动机工作模式时,电能从电网经由变频器传递到电机,转换为机械能带动负载,负载因此具有动能或势能;当负载释放这些能量以求改变运动状态时,电机被负载所带动,进入发电机工作模式,向前级反馈已转换为电形式的能量,这些能量被称为再生制动能量,可以通过变频器返回电网,或者消耗在变频器系统的制动电阻中。如图1-1所示。
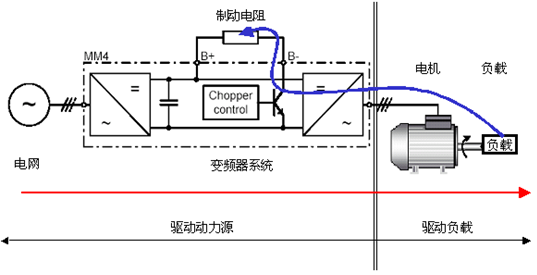
图1-1 驱动系统的能量流向
较大制动能量的产生经常出现在下面几种场合里:
? 起重设备的重物下放过程
? 大惯量负载设备的快速减速过程
? 游梁式抽油机的驴头下放过程等等。
西门子变频器MM440由三部分构成,整流部分,直流回路部分,逆变部分。当MM440作为驱动转换源而处在上述的制动过程时,制动能量将通过其逆变部分返回到直流回路,由于整流部分由不可控的二极管组成,制动能量无法回到电网,造成直流回路电压泵升,进而导致MM440因直流回路电压过高(F0002)而停机。为避免上述情形的发生,MM440 提供了动态制动功能,即在直流回路上安装一个制动单元,再配以适当的制动电阻,将制动能量在该电阻上以热能的形式消散。A-F尺寸的MM440已将制动单元集成在变频器内部,只需选配制动电阻,安装在MM440端子B+ B- 上,然后调整相应的参数即可,而功率相对较大的FX、GX尺寸MM440内部没有集成制动单元,需要从SIMOVERT MASTERDRIVES的产品目录里选配相应的制动单元以及制动电阻。
本章将介绍制动能量的简单计算以及MM440制动单元的基本工作原理,帮助您实现西门子MM440变频器制动电阻的正确选型。
二 制动能量的简单计算
? 制动能量的产生
根据电机理论, 定子中通入同步频率 ?1的交流电流, 在气隙中产生顺时针旋转磁场作用在转子上,相当于转子绕组逆时针运动切割旋转磁场,转子回路因而感应出电流产生旋转力矩M,方向如图2-1中a所示。经过负载的平衡,转子以 (1-s) ?1的速度稳定旋转,转子绕组仍然逆时针以s?1的速度切割旋转磁场。电机工作在电动机模式下, P = M?Ω>0, 即运行在*象限。
在需要变频器快速制动负载的情况下,变频器通入电机定子中的电流频率突降为?1′ (?1′ <?1), 由于驱动负载存在惯性,转子的转速不能突降,而是仍然维持在原转速上,导致转子绕组切割旋转磁场的方向改变,转子电流方向以及电磁力矩方向也因此发生改变,如图2-1中b所示,电机工作在发电机模式下, 开始运行在第二象限,P=(-M)?Ω<0, 再生制动能量产生。 如果电机被负载拖动,转子转速超过变频器输入的同步转速,同样会有上述的现象发生。

a) 正向运行时 b) 转子转速大于同步转速时
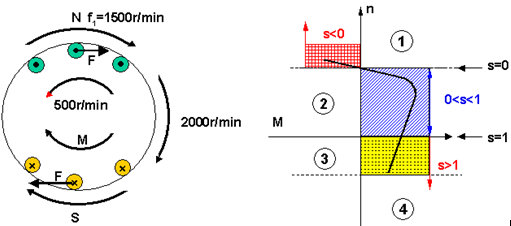
c) 转子旋转方向改变时 d) 电机四象限图
图2-1 制动能量产生时的电机状态
在驱动系统下放重物的过程中,转子绕组仍然保持逆时针运动切割旋转磁场,转子电流以及旋转力矩方向不变,但是由于切割速度过快,转子电流产生的祛磁磁场将能量返回了定子侧,电机工作在发电机模式下, 开始运行在第四象限,如图2-1中 c 所示,P=M?(-Ω)<0, 再生制动能量产生。
? 制动能量的简单计算
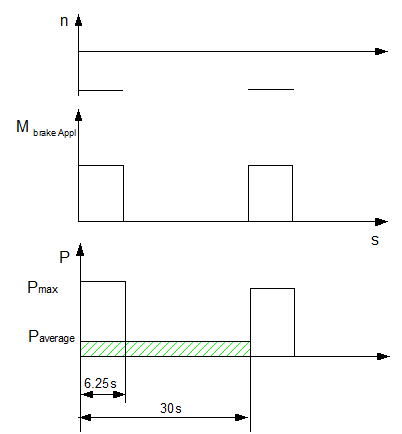
例1 某客户将MM440 应用在升降驱动设备上,并要求在6.25秒内以0.4m/s的速度下 放500kg的重物,每30s重复一次该过程,应当如何计算制动功率?
 西门子S7-1200代理
西门子S7-1200代理
重物的势能为: A= m x g x h =500kg x 9.81 x (0.4m/s x 6.25s)=12263J
大 功率为: P brake Appl max = A/s = 12263J/6.25s = 1962W
平均 功率为: P brake Appl average = 1962W x 6.25s / 30s= 392.4W
例2 某驱动负载需要从2900RPM的速度降至为0,其驱动数据见表1,如何计算反馈回变频器直流侧的制动能量?
电动机额定功率 Pmotor N=5.5 KW
电动机效率 ?motor =0.865
电动机额定转速 N motor N= 2925 RPM
电动机转动惯量 J motor =0.015kgm2
负载转动惯量 J load =0.4 kgm2
电动机高运行转速 nmax =2900RPM
制动时间 t brake appl =5s
负载工作周期 t cycle appl =15s
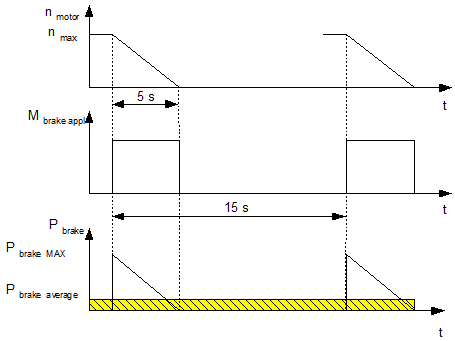
产生的制动转矩:
一个周期内产生的大制动功率:

一个周期内的总制动能量:


一个周期内的平均制动功率:

三 MM440 制动单元的基本工作原理
? 制动单元激活电压与直流回路故障电压
按照上述的计算方法得出的再生制动能量将反馈到变频器的内部,造成直流回路上电压泵升。为了避免变频器因直流回路过电压F0002而跳闸,当电压上升到临界点 UDC chopper 时,制动单元就被激活,并按照预先规定的负载工作周期将制动能量消耗在外接制动电阻上,拉动直流回路电压下降。如果制动能量过大,未能在规定时间内得到散逸,那么直流回路电压将继续上升,直到F0002跳闸。如图3-1所示。
图3-1直流回路电压的上升过程
| 制动单元触发临界电压 UDC chopper有两种算法,采用哪一种,则取决于MM440 参数P1254 | 若P1254=0 | 1.13 x  x P0210 x P0210 |
| 若P1254=1 | 0.98 x r1242 |
表3-1 激活动态制动功能的直流回路电压值
? 制动单元动作过程
MM440变频器制动单元的核心是一个门限电压控制斩波器(IGBT transistor),当它导通时再生制动能量被外接制动电阻吸收,转化成热能得以释放。斩波器的工作频率 f chopper为2KHz,占控比 t chopper on 由变频器内部的监控系统决定。如图3-2所示。
图3-2 动态制动的操作方式
当再生制动能量迫使直流回路电压达到UDC chopper时,制动单元自动投入运行,由监控系统为斩波器选择适当的占控比,制动能量被制动电阻吸收。
? 如果制动能量少于在制动电阻上消耗的能量( P brake resistor=VDC2 / Rmin) ,那么直流回路电压会很快下降到UDC chopper之下,制动单元会在开通2ms之后自动关闭,占控比的选择在通路1上完成。 若直流回路电压再次达到UDC chopper,该过程将被重复。
? 如果制动能量多于此时在制动电阻上消耗的能量,那么尽管制动自动已经投入运行,直流回路电压仍然会继续上升,由监控系统选择的占控比也快速线性增加,直到占控比为1(通道1),斩波器持续开通,制动电阻在此其间持续吸收制动能量。为了保护此时的制动电阻不会因吸收了过多能量而过热损坏,必须事先根据制动电阻的制动能力选择适当的持续工作时限 t chopper on。当持续工作时限达到时,切换到通道2,占控比自动被修正为P1237中设定的值以减少制动能量进入制动电阻,令其有充分的时间冷却,此时直流回路电压将有所回升。其过程如图3-3所示。可见,如果电阻值选择的太小,或者P1237 的值选择不当,会造成制动能量因吸收不净而导致的直流回路电压继续上升,而制动电阻会因过热而损坏。
MM440制动单元的斩波器为通道2规定了5种占控比,即负载工作周期,由参数P1237 来选择 。列表3-2如下。
| P1237 | t chopper on (斩波器占控比为1的长时间) | P brake resistor average | |
| 0 | 0% | 动态制动未激活 | 0 |
| 1 | 5% | 12.0s | 0.05 P brake Appl max |
| 2 | 10% | 12.6s | 0.1 P brake Appl max |
| 3 | 20% | 14.2s | 0.2 P brake Appl max |
| 4 | 50% | 22.8s | 0.5 P brake Appl max |
| 5 | 100% | 在制动单元激活状态下始终开通 | 1 P brake Appl max |
表3-2 MM440的负载工作周期
四 制动电阻的计算以及选型
? 西门子制动电阻的说明
西门子MICROMASTER 变频器产品样本DA51.2 中列出的制动电阻只是按照P1237=1即5%的工作负载周期来进行设计的。例如: 订货号为6SE6400-4BC05-0AA0的制动电阻,小阻值为180?,可以承受大直流回路电压为420V ,因此该制动电阻可在12秒内连续开通,吸收 Pbrake resistor max = U dc max 2 /R min =980W的大制动功率。12秒后,仅能承担5%的大制动功率,即约50W 的连续导通功率,直到240秒后制动电阻得到充分的冷却,方可再次承担12秒的大制动功率。
? 制动电阻的选择与校验
为MM440变频器配置制动电阻,需要满足二个条件:
1) 制动电阻大功率 P brake resistor max >= 大制动功率P brake Appl max
2) 负载工作周期内的制动电阻连续功率 P brake resistor average >=
制动周期内的平均制动功率 P brake Appl average
下面举例说明如何选择制动电阻, 请回顾第二节中的例2,为5.5KW 、3~380-480V的MM440配置制动电阻,按照样本DA51.2初选6SE6400-4BD16-5CA0
一个制动周期内产生的大制动功率: P brake Appl max = 6.6kW
制动电阻可以承受的大制动功率: P brake resistor max =12.6 kW
P brake Appl max < P brake resistor max *个条件满足
一个制动周期内的平均制动功率: P brake Appl average =1.1kW
负载工作周期内的制动电阻连续功率: P brake resistor average = 0.65 kW
P brake Appl average > P brake resistor average第二个条件不满足
表明该制动电阻没有足够的容量接受1.1kW的制动能量。在此,可以提出两个解决方案:
1)采用四个该型号电阻,两并两串地接入,见图3-4。总的制动阻值并未改变,因而能够承受的大制动功率 P brake max = U dc max 2 /R min 也未改变。 但是负载工作周期内的制动电阻连续功率却提高了4倍,
P brake resistor average = 0.65kW × 4 = 2.6kW。此时P1237 必须放开限制,设置为3,即负载工作周期为20%。
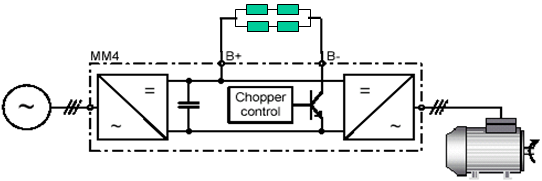
图3-4 制动电阻的接入方法
3) 选择其他型号大容量的制动电阻,例如采用MASTERDRIVES 产品系列中订货号为6SE7018-0ES87-2DC0的制动电阻,其阻值为80?, 因此能够承受的大制动功率P brake max =U dc max 2 /R min =8.82kW,
P brake Appl max < P brake resistor max *个条件满足
因为MASTERDRIVES 产品系列的制动电阻均是按照20%的负载工作周期制定的,因此需要将P1237设置3,P brake resistor average =8.82kW×0.2=1.764kW
P brake Appl average < P brake resistor average第二个条件满足
? FX-GX 制动单元与制动电阻选择
在MICROMASTER DRIVES系列中,仅在外形尺寸为A-F的MM440里集成了制动单元,只需再选择一个适当的外接制动电阻即可。外形尺寸为FX 、GX的MM440因为功率相对较大,不再在内部集成制动单元,而是需要采用MASTERDRIVES系列中的外接制动单元以及制动电阻。其选择方法参见MASTERDRIVES产品样本。
? MM440 中相关动态制动的必要参数设置
P1233=0 禁止直流制动
P1234=0 禁止复合制动
P1240=0 禁止直流电压控制器功能
P1254=0或1 选择 UDC chopper的计算方法
P1237>0 使能动态制动功能
 化工仪器网
化工仪器网