 化工仪器网
化工仪器网










详细介绍
西门子6SL3210-1SE24-5AA0
6SL3210-1SE24-5AA0
SINAMICS S120 变频器 功率模块 PM340 输入:380-480V 三相交流,50/60Hz 输出:三相交流 45A(22kW) 结构形式:块大小 组件 FSD 安装有进线滤波器 内部风冷
1. 概述
西门子驱动装置(SIMOVERT MasterDrives VC,MicroMaster 4 以及SIMOREG DC Master)除了具有与驱动基本应用有关的功能外,还具有强大的通讯功能。驱动通讯可以分为三种方式:
? PROFIBUS DP协议
? USS协议
? SIMOLINK协议(一般用来代替Peer to Peer协议,实现从站到从站的通讯)
PROFIBUS DP和USS协议属于主/从通讯,需要有PLC作为主站,驱动装置作为从站。
USS协议的主要优点是,其接口集成在基本装置中,不需要额外费用;主要缺点是通讯速度慢,只有基本通讯功能(PKW+PZD),多31个从站。
PROFIBUS DP协议的主要优点是,通讯速度快,除了基本功能之外还有一些附加功能(例如:非循环通讯,交叉通讯),站点数更多;主要缺点是需要另外购买作为选件的通讯模板(例如:CBP2或PROFIBUS模板)。
SIMOLINK协议(代替Peer to Peer协议)主要用来实现驱动装置与驱动装置之间的通讯。SIMOLINK协议也可以是主/从通讯,主站是S7-400(FM458+EXM448)或SIMADYN D。
这里我们主要介绍S7 PLC与驱动装置采用PROFIBUS DP协议进行通讯。
采用PROFIBUS DP协议通讯时,既可以利用STEP 7本身提供的功能,也可以使用TIA软件Drive ES。
本文档只介绍STEP 7本身提供的功能。有关Drive ES的功能将根据需要在以后的文档中再做介绍。
(关于 DriveES,可以参加西门子自动化与驱动培训中心的培训课程D2403)
2. *条件
下面以S7-300 PLC与MasterDrives CUVC变频器的通讯为例:
主站:S7-300 CPU315-2DP可编程序控制器
从站:MasterDrives CUVC变频器 + CBP2 通讯模板
编程装置:PC + STEP 7 V5.4 + MPI接口(MPI Adapter 或CP5611卡)
装有STEP 7 V5.4 的PC机用于S7 CPU315-2DP的硬件组态与编程,通过MPI电缆与CPU315-2DP的MPI接口连接,用于硬件组态数据及程序的下载。CPU315-2DP的DP接口通过PROBIBUS 电缆与CUVC 变频器的CBP2 上的DP 接口连接,用于S7-300 与变频器的通讯。
网络连接如图1 所示。

图1:PC机、CPU315-2DP 与驱动装置的连接
3. 硬件组态
3.1. 新建项目
在SIMATIC Manager 中新建一个项目,名称为Drives_Comm。如图2 所示。
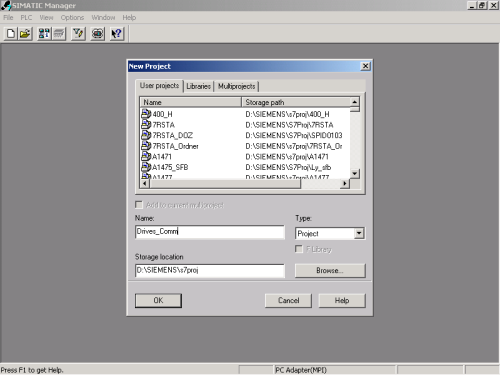
图2:新建项目,名称为Drives_Comm
3.2. 插入一个S7-300 主站
在项目名称Drives_Comm 下插入SIMATIC 300 Station,如图3 所示。
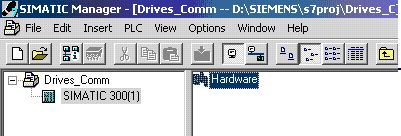
图3:在项目下插入一个S7-300 站
接下来对该站进行硬件组态:从硬件组态目录中依次插入机架、电源、CPU,设置CPU上PROFIBUS DP 接口的网络参数(可采用缺省设置,即:地址2,高地址126,波特率1.5 Mbps,协议DP)。如图4 所示。
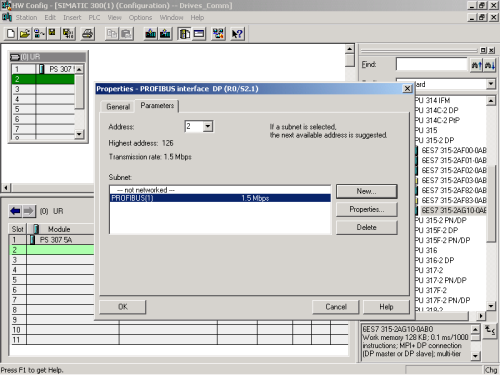
图4:设置CPU 上PROFIBUS DP 接口的参数
按OK 键确认后得到主站的组态结果,如图5所示。
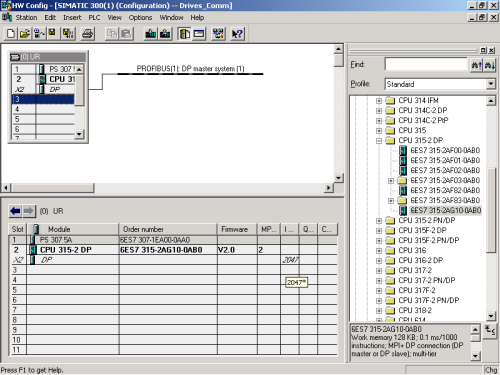
图5:主站的组态
3.3 插入一个MASTERDRIVE 从站
在PROFIBUS(1): DP master system (1) 总线上挂上MasterDrives 从站。
从站路径为:PROFIBUS DP >
SIMOVERT >
MASTERDRIVES/DC MASTER CBPx 或
MASTERDRIVES/DC MASTER CBP2 DPV1
MASTERDRIVES/DC MASTER CBPx 与MASTERDRIVES/DC MASTER CBP2 DPV1 的区别是,前者只能按照PPO 类型选择报文结构(即CBP 功能:循环通讯),后者还能选择更多的报文结构,以配合CBP2 的一些扩展功能(DPV1功能)。
(关于CBP2 模板的报文结构参见下面第7 部分)
(关于MM4 PROFIBUS 模板的报文结构参见下面第8 部分)
选择MASTERDRIVES/DC MASTER CBP2 DPV1 作为从站,地址设成3。如图6 所示。
 西门子6SL3210-1SE24-5AA0
西门子6SL3210-1SE24-5AA0
图6:选择MASTERDRIVES/DC MASTER CBP2 DPV1 作为3 号站
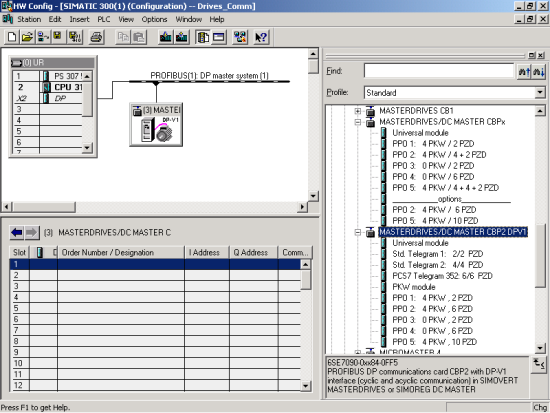
3.4. 在从站中插入“模板”
在驱动装置从站中插入类似于ET 200M 从站中的模板,以确定报文结构。
将右边窗口硬件目录中MASTERDRIVES/DC MASTER CBP2 DPV1 下面的 PPO 3: 0PKW, 2PZD插入左下窗口中的*行(Slot 1)。该选项共占两行。意思是:PPO类型3,即:0个字参数数据(又叫PKW),2 个字过程数据(又叫PZD)。参数数据用于PLC 读/写变频器的参数,过程数据用于PLC 控制和监视生产过程。0 个字参数数据表示PLC 不能读/写驱动装置的参数,参数数据也不占用S7 的外设地址;2 个字过程数据表示PLC 和驱动装置交换2 个字过程数据,各占用S7-300 PLC 四个字节的外设地址。地址范围是输入字节256 - 259,输出字节256 -259。如图7 所示。
通常S7 传送到驱动装置的第1 个字是控制字,第2 个字是频率设定值;驱动装置传送到S7的第1 个字是状态字,第2 个字是频率实际值。这是简单的应用。
(关于CBP2 模板的其他选项的含义参见下面第7 部分)
(关于MM4 PROFIBUS 模板选项的含义参见下面第8 部分)

图7:驱动装置的输入/输出地址
3.5 查看从站中“模板”的属性
双击左下窗口中的第二行(Slot 2),打开其属性。如图8 所示。
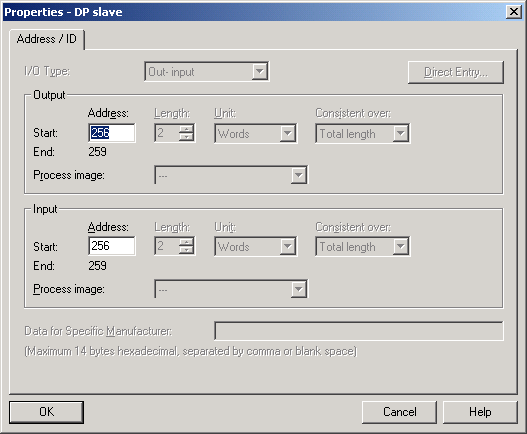
图8:驱动装置的输入/输出地址的属性
属性中给出驱动装置占用S7-300 PLC 外设地址的情况,包括:输出/输入地址,长度,单位,连续性范围。这里除了地址之外,其他属性都是由PPO3 决定的,只能读,不能改写。
| 提示: | ||||||
| 长度: | MASTERDRIVES/DC MASTER: | 大 16 个字 | ||||
| MICROMASTER 420: | 大 4 个字 | |||||
| MICROMASTER 430/440: | 大 8 个字 | |||||
| 单位: | Words(字) | |||||
| 连续性范围: | Unit | 以字为单位传送 | ||||
| Total length | 所有字一起传送 | |||||
当字长不大于 2 或选择“以字为单位传送”时:用 MOVE 指令(L/T 指令)编程
当字长大于 2 且选择“所有字一起传送”时:用 SFC14/15 编程
4. 编程
根据前面的组态,由于输入/输出各占四个字节,可以使用两次MOVE 指令(L/T 指令)。由于程序简单,程序可以直接编写在OB1 中。数据从MB0 - MB3(即:MW0和MW2)写入驱动装置,从驱动装置读回的数据放入MB4 - MB7(即:MW4和MW6)。如图9所示。
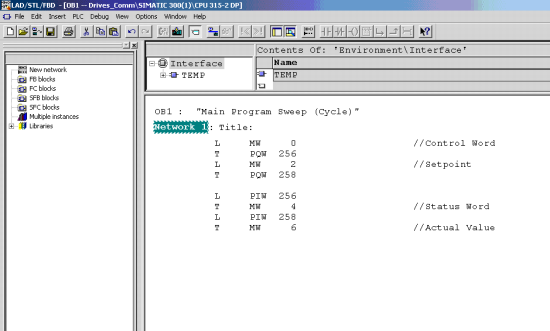
图9:PLC程序
传送到驱动装置的第1 个字(MW0)是控制字(控制指令):
当 MW0 = 0000 0100 0000 0000 B = 0400 H 时,驱动装置处于运行准备状态;
当 MW0 = 0000 0100 0000 0001 B = 0401 H 时,驱动装置进入运行状态1)
1) 相应于第5部分参数设置,PLC 只控制驱动装置起/停。若要传送所有指令应设置:
MW0 = 1001 1100 0111 1110 B(9C7EH)<-> 运行准备
MW0 = 1001 1100 0111 1111 B(9C7FH)<-> 运行
同时设置:P555~P575 = 3101~3115
传送到驱动装置的第2 个字(MW2)是频率设定值:
当MW2 = 0100 0000 0000 0000 B = 4000 H= 16384 D 时,相当于50Hz。
5. 参数设置
在驱动装置侧,驱动装置应处于可以运行的状态。为了实现与PLC 之间的通讯,以及从PLC 接收起/停指令和设定值,向PLC 传送状态字(驱动装置状态)和实际值,应如下更改参数:
| P918.01 = 3(缺省设置) | 驱动装置地址(即:站号) | ||||
| P554.01 = 3100 | 起/停指令(ON/OFF1) | ||||
| P443.01 = 3002 | 频率设定值(Setpoint) | ||||
| P734.01 = 32 | 状态字1(Status Word1) | ||||
| P734.02 = 148 | 频率实际值(Actual Value) | ||||
参数设置可以通过操作面板PMU,也可以通过DriveMonitor 软件进行。
6. 测试
启动STEP 7的Monitor/Modify Variables 功能,填写变量。如图10 所示。
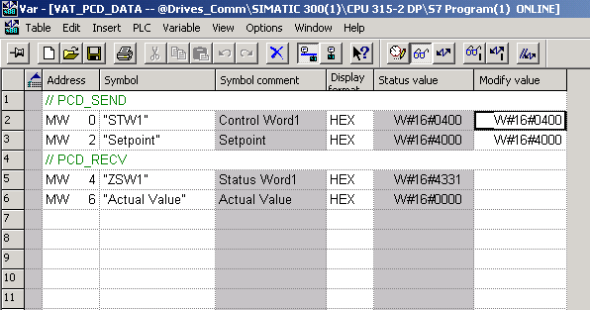
图10:用监视和修改变量功能控制驱动装置起动和调速
当控制字(Control Word1)为W#16#0400 时,驱动装置应显示O009,表示运行准备状态。将控制字从W#16#0400 改成W#16#0401 时,驱动装置起动。除了状态字(Status Word1)会发生变化外,速度实际值(Actual Value)也会逐渐上升,上升速度取决于参数P462.01 的数值,后达到W#16#4000(50Hz)。状态字的含义如图11 所示。其中Bit 2 表示运行状态。将控制字改回W#16#0400 时,驱动装置首先减速,减速时间取决于P464.01 的数值,然后停止运行。
说明
SIMATIC TDC是一个多处理器的高性能自动化系统,特别用于大型设备中的过程控制、快速响应以及多驱动同步等方面。
SIMATIC TDC还在单一平台上通过大数量框架和小循环时间解决了复杂的驱动、控制和技术任务,因此在高级性能范围内对SIMATIC S7是一个理想的补充,解决S7-400无法完成的任务。
SIMATIC TDC是集成到SIMATIC中的技术和驱动自动化系统,通过使用经广泛应用测试的标准SIMATIC编程、通讯和诊断技术。
硬件组态 STEP7
图形化组态 CFC(工艺图)和SFC(流程图);
PROFIBUS DP和工业以太网
SIMATIC WinCC和SIMATIC Operator Panels
应用领域
SIMATIC TDC的高速循环周期使得TDC能够在以下的应用领域发挥优势
SIMATIC TDC的小循环周期为0.1ms
对于传动的闭环控制(转矩、转速、位置、角度/角差、速度),特别是如果对多个驱动器进行协调或者驱动器之间存在着复杂的关系
用于调节多个/不同的物理变量(例如张力,压力)
用于计算若干过程/设备变量(例如:温度)
SIMATIC TDC有助于缩短计算周期(100微秒),具有功能性储备和突出的灵活性。
SIMATIC TDC的应用示例包括:
金属生产,金属加工和金属机加工,冷轧、热轧、高速带线材、高速棒材、拉矫平整等,例如:自动辊缝控制、飞剪、开卷卷取、小车定位
用于远距离高压直流输电、智能电网、柔直风电场接入,例如:晶闸管或者IGBT通断控制
用于稳定电力传输的无功功率补偿,例如:电容器单元,电容器组
优点
由于具有高的计算能力因而提高了产能和竞争力
由于降低了组件密度并简化了备件储备而降低了采购成本
由于使用了通用的标准工具和重复使用现有软件而降低了工程组态成本
使用标准
设计和功能
SIMATIC TDC 包括了一个或多个机架,机架上可以插入所需的模块。多处理器运行使性能几乎可以无限扩展。
使用可扩缩硬件的模块式系统结构
实时操作系统小采样循环周期100us
由于具有 64 位构架的 CPU,能够实现高的性能
每个机架多可以配备 20 个 CPU 进行同步多处理
由于使用了 VME 总线系统可以在 CPU 之间实现*的通讯性能
同步耦合多 44 个机架
使用 STEP 7 工程组态工具实现了图形组态连续功能图(CFC)和顺序功能图 SFC(顺序功能图)
C语言,功能块生成器
SIMATIC TDC 是一款模块式多处理器系统,由一个或多个机架构成。机架配备有 CPU、I/O 模块和通讯模块
UR5213 机架
电磁屏蔽 19" 的 UR5213 机架允许具有大能力储备的硬件的可扩缩式的扩展。适合于安装在墙上和机柜安装,带有一个集成电源,电源带有有源冷却和内部监视装置。通过插入多 20 个 CPU 或者把多 44 个机架连接起来以提高性能。
中央处理单元 CPU551
中央处理单元 CPU551 适用于具有非常高的计算要求的开环和闭环控制任务。CPU 根据可调的扫描间隔可以确保实现严格的循环处理。
I/O 模块 SM 500
SM500 I/O 模块可以为连接数字和模拟 I/O提供丰富的选件。此外,还可以连接增量位置编码器和值编码器。
CP50M1、CP51M1通讯模块
CP50M0 和 CP51M1 通讯模块可以为试运行、过程控制和 HMI 提供高性能的通讯。它们可以处理 MPI、PROFIBUS DP 协议,以及使用 TCP/IP 和/或 UDP 协议的以太网。
全局数据存储器 GDM
通过全局数据存储器(GDM),一系列带有 CP52x0 的机架可以相互通讯,能够扩展出几乎无限的计算能力。通过光缆和共享存储器多有 44 个机架可以互联。除了机架间的通讯,GDM 还可以实现同步(扫描时间、时钟时间)和报警功能。更新时间设置为 < 1 ms。
框架连接模块 CP53M0
CP53M0 框架连接模块可以提供以下功能:
把 SIMATIC TDC 系统耦合到 SIMADYN
D 系统把 SIMATIC TDC 系统耦合到另外两个 SIMATIC TDC 机架上
用于 CPU 模块与机架间数据交换通讯缓冲器

德国在可再生能源发电领域处于优秀地位。在电力矩阵中,可再生能源发电也正在发挥日益重要的作用。尽管如此,专家仍在仔细考虑,哪种市场模式适合能源转型。不过,在这方面的一大技术挑战,即平衡风电和太阳能发电所造成的电力波动,可能很快就会得以解决。研究项目Kombikraftwerk 2表明,即便上网电力全部来自可再生能源发电,德国的电网也能稳定运行。项目合作伙伴(包括西门子中央研究院)还指出,如果太阳能、风能与生物质发电厂能够彼此连接,形成一个以智能方式控制的电厂,将有助于系统稳定。
除风能、太阳能、生物质能和地热电厂外,水电站、抽水蓄能电站和电转气设施也是项目方案的重要组成部分。剩余电力用于电解,产生氢气,而氢气与从火力发电厂的废气中分离的二氧化碳结合,形成甲烷,然后送入公共燃气管网。每当出现电力瓶颈,燃气电厂即可利用这种甲烷来生产电力。根据天气数据和用电数据,能够极为详细地模拟计算出一年中每小时的电力供需量,并确定如何在电网中传输电力。
电网频率和电压必须保持稳定,目的是防止停电。因此,电厂需要提供能够应对这种情况的电力。为了在发生频率和电压变化的情况下保证电力储备,风电机组叶片的设置要进行调整,以降低输出功率,并且需要使用将电力送入电网的逆变器,对光伏电站发电量加以限制。模拟试验和现场测试表明,由可再生能源、燃气轮机和储能系统组成的联合电厂可在短短几秒之内提供所需的电力。
西门子的专家们就如何更经济地建设电解厂和沼气电站进行了优化计算,并确定了电网的扩张幅度。此外,他们还计算出了每个瞬间和每个位置的电网电量,并通过与汉诺威大学的合作研究,得出所需的无功控制功率。这样,他们能够详细描绘出如何在长达一年的时间内让电网始终保持稳定。
除西门子外,为期三年的Kombikraftwerk 2项目合作伙伴还包括德国气象服务局、Enercon公司、弗劳恩霍夫风能及能源系统技术(IWES)研究所、?kobit、汉诺威莱布尼兹大学、SMA太阳能技术公司、SolarWorld和德国可再生能源机构。

 化工仪器网
化工仪器网