 化工仪器网
化工仪器网










详细介绍
西门子6AG4112-2DK10-0AA0 西门子6AG4112-2DK10-0AA0
上海盟疆工业自动化设备有限公司工业业务领域致力于为客户提供高品质的服务,追求客户的满意是我们始终如一的目标。在中国,工业业务领域拥有一支技术过硬、经验丰富的工程师队伍,为客户提供7x24小时全天候服务。专业的服务人员和遍布全国的服务及备件网络将对客户的服务需求迅速作出响应,将由设备故障引起的损失降低到小的程度。
2017年2月底,就快过鸡年春节了,某大厂停机检修,其中有3台变压器控制柜需要更换继保,计划停机4天时间。原来品牌是AREVA(阿海珐)的,现在更换为西门子7SJ68系列。公司本想只供应产品的,但客户要求负责安装、调试。项目拿下来后,由于继保我们没调过,西门子这个装置还必须用软件调试,于是只能找有调试经验的人了,找了一厂家,说可以做,谈好价钱签好合同,小项目应该不会有什么问题。
前期进场测量安装尺寸,新旧产品安装尺寸、接线对比,出图纸,准备材料,万事俱备,只欠停机了。停机了我们马上进场,拆旧的装新的,接线,加班加点一天完成了,通知厂家第二天安排技术人员过来。人到了,看了一下,说这个调试我们做不了哦,软件我们也不会,我们只能做继保测试、校验。我傻眼了,立马跟公司沟通,四处问人找人,没人会调,找到会的也在国外调试,一时半会回不来。没办法了,只能自己试了。下载手册、软件,摸索软件使用、参数设置,通讯等……,在线连接,怎么都连接不上(后来发现不是标准的串口线,针脚定义不一样),都快急坏了,后来其他分厂有一条用过的线,借过来就连接上了,然后开始设置相关整定参数,输出等,完了后让专业的厂家做测试,校验整定值。终顺利完成,松了一口气,可以放心回去过年了。
SIPROTEC装置介绍
SIPROTEC 4 7SJ68 专为本地用户设计。它提供了大屏幕显示,全中文人机界面,因此调试和操作非常方便。
SIPROTEC 4 7SJ68用途广泛,它可用在配电线、输电线上作保护、控制和监视。可用于不同电压等级的接地、小电阻接地、不接地或中性点补偿接地的网络。该装置既适用于辐射网也适用于环状网,既适用于单端供电线路也适用于多端供电的线路。7SJ68的基本功能是过流保护和方向过流保护。其时间特性曲线可以是定时限、反时限或用户定义的。
SIPROTEC 4 7SJ68提供了方便易用的当地控制和自动化功能。控制开关的数量取决于可用的输入/输出的数量。集成的可编程逻辑工具(CFC)允许用户实现自定义功能,如开关闭锁。用户也能生成自定义的信息。
SIPROTEC 4 7SJ68的人机界面是专为中国市场设计的,所有的界面标识和显示信息全是中文的。
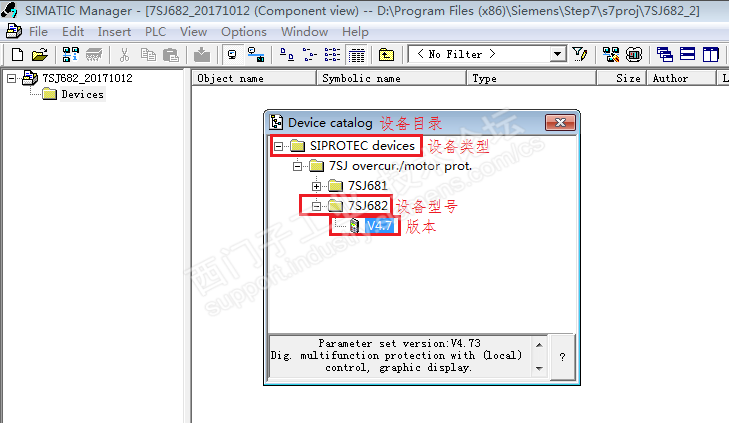
软件DIGSI V4.91,这个软件跟STEP7差不多的,先组硬件,然后配置相关参数,原来给客户培训整理了一些资料,顺便也给大家大概介绍一下吧。

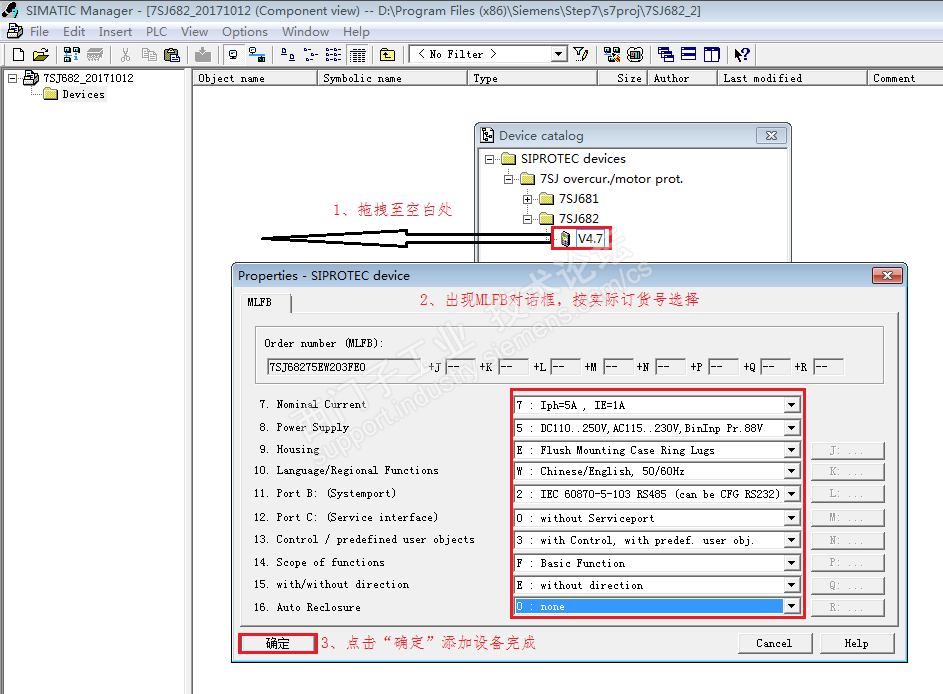
硬件组态
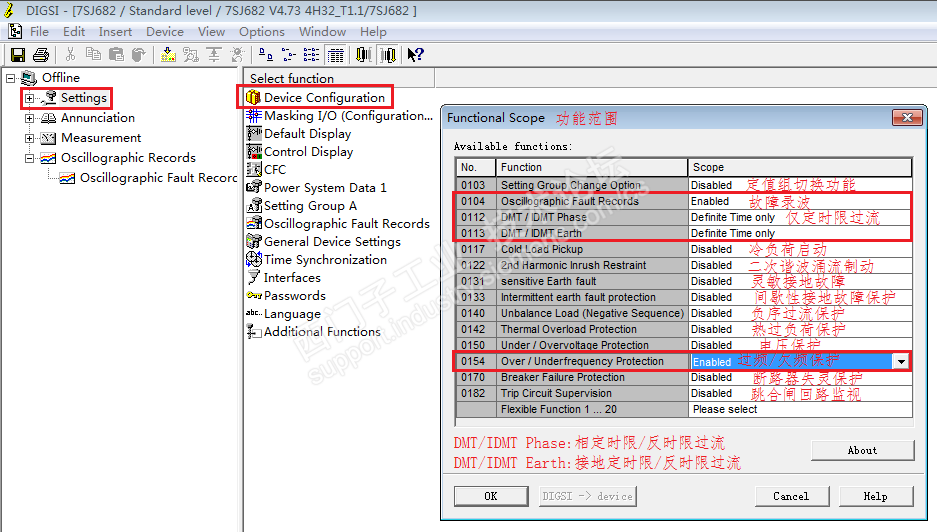
功能范围设置
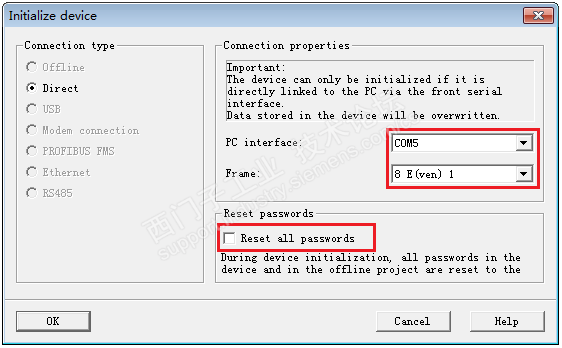
设置通讯参数,*次连接需要初始化
设置相关整定参数

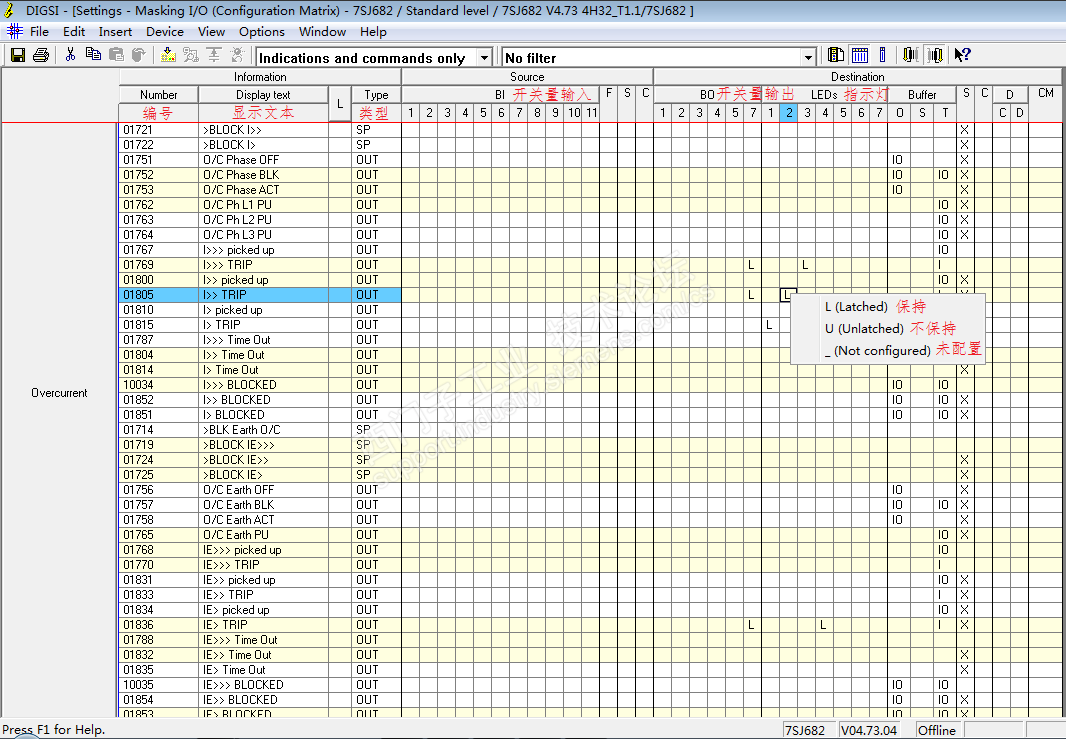
设置矩阵表,其实就是定义I/O
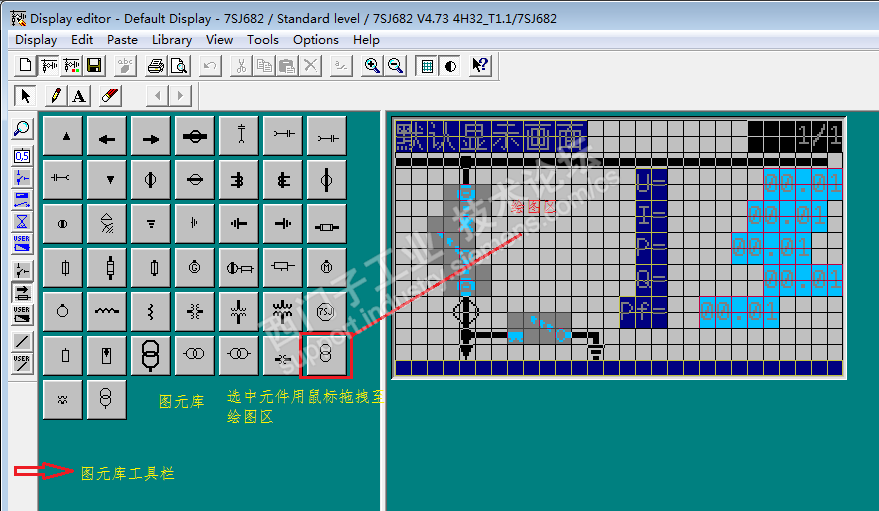
设置显示界面
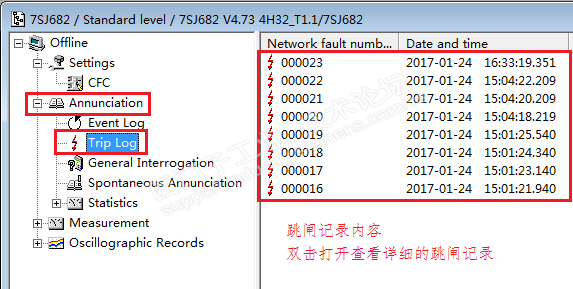
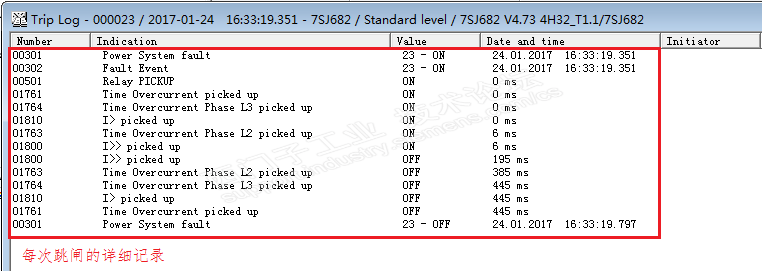
故障记录
西门子7SJ68功能强大,这里用到的只是基本的功能。
后记:对于这种改造项目要很谨慎,时间紧迫又重要,隔行而隔山,连找人都没途径,对于专业/产品不熟悉,很容易出问题,万一出点意外,罚款,声誉受损……会损失惨重啊。
11月末东北已经正式进入冬季,天气渐渐变冷,室内的温度跟着室外温度慢慢的降了下来。每年都有暖气,室内不见得有多冷,今年就感觉特别的冷。虽然今年夏天办公室增加了一台空调,可是冬天到了,空调制热的功能却没有夏天制冷的效果那么好。在有暖气的地方待过的人都知道,要放放气暖气就热了,今年无论怎么放,暖气都是那样。于是就想到了换热系统是不是有问题了,进到控制室差的没吓死我,原来我们单位的换热系统这么”、大气、上档次“。



看了一下,一个变频器简单的恒压供给系统,变频器还是一个国产的。压力表一直没起来,可是泵还时断时续的转,莫非这么一个简单的东西还有别的地方影响?查吧,也没有图纸,我从来没见过做的这么"优秀"的布线,真是给我震住了。找了一圈,使能信号一直有,泵停的时候也有。那就捋动力回路吧,捋到接触器下边时,发现了上图中的下一排的东西,判断应该是热保吧,没有铭牌,看着上边有调节整定值的地方,不会是整定值不够吧,运行了好几年了整定值不能不够啊,看看电机铭牌:

果然啊,整定值设置在2.5,整定值调大后问题解决。
没见过这种热保,还具有自动复位的功能,长见识啊!
1.1 基本概念
插补的概念源于数控机床。在数控机床中,刀具不能严格地按照要求加工的曲线(直线)运动,只能用折线轨迹逼近所要加工的曲线。机床数控系统依照一定方法确定刀具运动轨迹的过程,叫做插补。也可以说,已知曲线上的某些数据,按照某种算法计算已知点之间的中间点的方法,或者称为“数据点的密化”。插补的动作过程:在每个插补周期(极短时间,一般为毫秒级)内,根据指令、进给速度计算出一个微小直线段的数据,刀具沿着微小直线段运动,经过若干个插补周期后,刀具从起点运动到终点,完成轮廓的加工。
路径运动初来自于机器人和CNC领域,用机器人编程语言或G-Code编程。它是指在多维空间中,通过一组轴的协作动作,各轴之间无主从之分,它们按照设定的动态响应特性,实现路径对象从起点到终点的的路径轨迹运动。
路径插补产生路径的运行轨迹,计算插补周期内的路径插补点,并通过机械运动系统转换获得对应插补周期内插补点的各路径轴设定值。
隶属于机械运动系统的单独轴在S7 technology中被为路径轴,路径轴通过路径对象执行路径运动。参考图1 路径轴与路径对象。
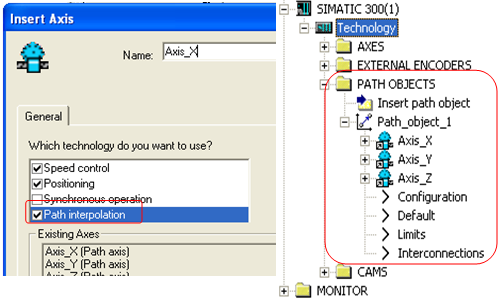
图1 路径轴与路径对象
1.2 S7-Technology 路径功能特点
S7-Technology 路径插补功能概述:
> 从S7-Technology V4.2开始
> 允许进行3轴插补操作
> 路径插补可以通过直线、圆弧、多项式表示实现
> Move Path命令可以组成连续运动
> 支持多种机械运动学模型
> 可以与外部位置值同步,实现传送带跟踪功能
S7-Technology 路径插补的技术特点:
> 所有的路径轴都相互同步移动
> 所有的路径轴都同时到达目标位置
> 路径轨迹的移动,将会始终是以一个固定的合成速度进行 (如果动态
特性限制没有被超越)
> 低速度性能的轴,决定了整个轨迹的高动态特性
路径差补可以执行多3轴之间的2D或者3D的线性、圆弧或者多项式插补,路径差补工艺对象(TO) ,适用于机械运动学控制范畴,一个共同的系统中,可以存在多个机械运动学控制结构。同步于路径轴的“同步轴”,仍然可以实现同步控制,例如,旋转,凸轮开关,测量功能。通过图形化编辑器,可以简便地设置机械运动学控制系统的参数;通过动态特性轮廓窗口,可以轻松定义路径的动态特性;通过轨迹点表格,可以轻松定义路径差补,计划目的地路径。另外还可以定义保护防撞区域和实现传送带位置的精确跟踪。
1.3 机械运动系统的选择
T-CPU 所实现运动学,等同于人们过去所熟悉机械运动学。可以将它们分为如下两种不同的类型。参考图2 在 T-CPU 中集成的机械运动学。
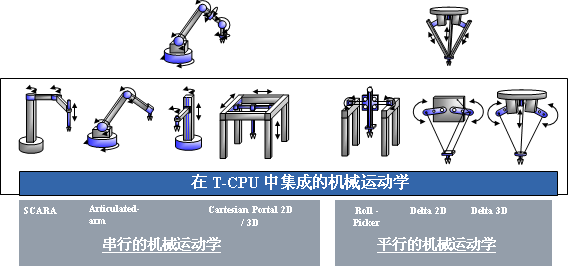
图2 在 T-CPU 中集成的机械运动学
不同的机械运动系统可以实现TCP (Tool Center Point,工具中心点或机械运动端点)相同的路径运动功能。尽管在某些情况下,不同的机械运动系统可实现相同的路径运动,但是,如果机械运动系统选择不合理,将有可能无法完成的路径功能。所以,必须根据实际的工艺需求选择合适的机械运动系统,并在工厂布局中考虑该机构的的合理安装位置。参考图3 不同机械系统的转化。
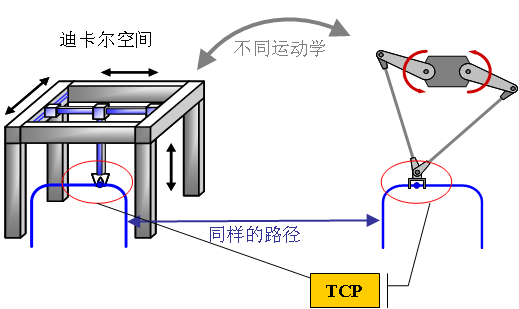
图3 不同机械系统的转化
2 路径插补的实现方法
2.1 运动学模型简介
常用的运动学模型请参考图 4 运动学模型。
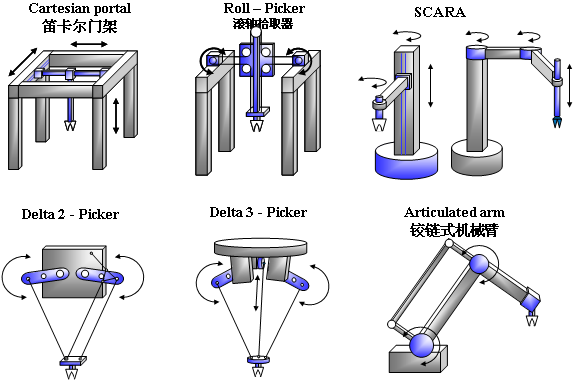
图 4 运动学模型
下面介绍一些常用的运动学模型。直角坐标机器人 (英文名:Cartesian coordinate robot),大型的直角坐标机器人也称桁架机器人或龙门式机器人,由多个运动自由度建成空间直角关系的、多用途的操作机器。工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。因末端操作工具的不同,直角坐标机器人可以非常方便的用作各种自动化设备,完成如焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂等一系列工作。参考图5 直角坐标机器人。
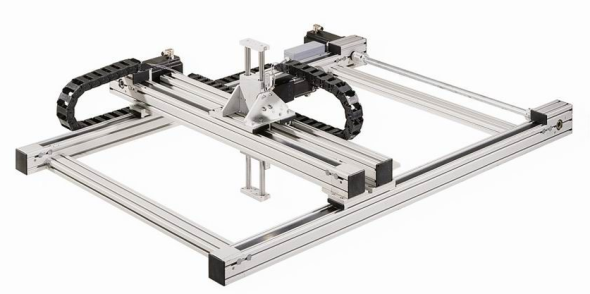
图5 直角坐标机器人
SCARA 机器人(Selective Compliance Assembly Robot Arm)是一种圆柱坐标型的特殊工业机器人。有3个旋转关节,其轴线相互平行,在平面内进行定位,另一个关节是移动关节,用于完成机械末端在垂直平面的运动。SCARA机器人在x,y方向上具有良好的顺从性、灵活性,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作。SCARA机器人广泛应用于塑料工业、汽车工业、电子产品工业、药品工业和食品工业等领域。它的主要职能是搬取零件和装配工作。 参考图6 SCARA 机器人。
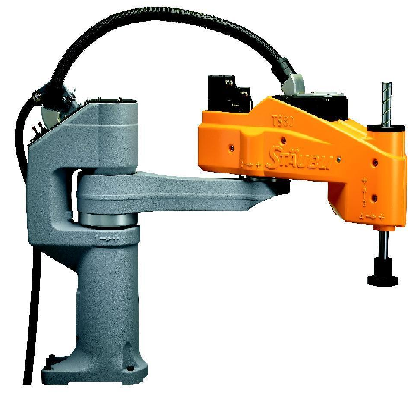
图6 SCARA 机器人
铰链型机械臂:有很高的自由度,可以多至5~6轴,适合于几乎任何轨迹或角度的工作,可以自由编程,完成全自动化的工作, 提高生产效率;可以代替很多不适合人力完成、有害身体健康的复杂工作,比如,汽车外壳点焊。参考图 7 铰链型机械臂。

图7铰链型机械臂
Delta 3D机器人:外形酷似一只蜘蛛,这种*的几何结构赋予了它们质量轻,强度大,轻便灵活,节省空间,高速,敏捷;适用于高速分拣。参考图8 Delta 3D机器人。

图8 Delta 3D机器人
DP从站
ET200 L
6ES7 131-1EH00-0XB0-电子模块DI 16 x AC 120V
6ES7 133-1EH00-0XB0-电子模块DI8/DO8 x AC120V
6ES7 133-1JH00-0XB0-电子模块DI8/RO8 x AC120V
6ES7 133-1BL01-0XB0-ET 200L 16DI/16DO DC 24V/0.5A
ET200 M
6ES7 153-1AA03-0XB0-IM 153-1,分布式,PROFIBUS-DP
6ES7 153-1AA83-0XB0-IM 153-1,分布式,PROFIBUS-DP
ET200 S
6ES7 151-1CA00-0AB0 - ET 200S接口模块IM151-1 基本型
6ES7 151-1AB02-0AB0 - ET 200S接口模块IM151-1 FO STANDARD
6ES7 151-1BA00-0AB0 - ET 200S接口模块IM151-1 High Feature
6ES7 151-1AA03-0AB0 - ET 200S接口模块IM151-1 标准型
ET200 X
6ES7 147-1AA01-0XB0 - ET200X:基础模块BM147/CPU
6ES7 147-1AA10-0XB0 - ET 200X:基础模块BM147-1 CPU
6ES7 141-1BF01-0XB0 - ET200X:基础模块BM141,8DI
6ES7 141-1BF01-0AB0 - ET 200X:BM141 - ECOFAST RS485 8DI
DP主站
C7
6ES7 626-2DG04-0AE3 - SIMATIC C7-626/P DP,成套设备
6ES7 633-2BF02-0AE3 - SIMATIC C7-633 DP,成套设备
6ES7 634-2BF02-0AE3 - SIMATIC C7-634 DP,成套设备e
6ES7 635-2EC01-0AE3 - SIMATIC C7-635 Keys,成套设备
6ES7 635-2EB01-0AE3 - SIMATIC C7-635 Touch
6ES7 636-2EC00-0AE3 - SIMATIC C7-636 Keys,成套设备
S7-300
6ES7 313-6CE01-0AB0 - CPU313C-2 DP,32KB,16DI/16DO;DP-SS M/S
6ES7 314-6CF01-0AB0 - CPU314C-2 DP,48KB,24DI/16DO/4AI/2AO,DP-SS M/S
6ES7 315-2AF03-0AB0 - CPU 315-2 DP, 64 kB,0.3 ms/kAW
6ES7 315-2AG10-0AB0 - CPU 315-2DP, 128 kB,0.1 ms/kAW
6ES7 315-6FF01-0AB0 - CPU 315F
6ES7 316-2AG00-0AB0 - CPU 316-2DP,128kB, 0.3 ms/kAW
6ES7 317-2EJ10-0AB0 - CPU 317-2 PN/DP,512 kB,0.05 ms/kAW
6ES7 317-6FF00-0AB0 - CPU 317F-2DP,512 kB,0.1 ms/kAW
6ES7 318-2AJ00-0AB0 - CPU 318-2,512 kB,0.1ms/kAW
S7-400
6ES7 412-1XF03-0AB0 - CPU 412-1,96 kB,0.2ms/kAW
6ES7 412-2XG00-0AB0 - CPU 412-2,144 kB,0.2ms/kAW
6ES7 414-2XG03-0AB0 - CPU 414-2,256 kB,0.1ms/kAW
6ES7 414-3XJ00-0AB0 - CPU 414-3,768 kB,0.1ms/kAW
6ES7 416-2XK02-0AB0 - CPU 416-2,1.6 MB,0.08ms/kAW
6ES7 416-3XL00-0AB0 - CPU 416-3,3.2 MB,0.08ms/kAW
6ES7 416-2FK02-0AB0 - CPU 416F-2,1.6 MB,0.08ms/kAW
6ES7 417-4XL00-0AB0 - CPU 417-4,4 MB

 化工仪器网
化工仪器网