 化工仪器网
化工仪器网










详细介绍
西门子6AG4112-2DP10-0AA0 西门子6AG4112-2DP10-0AA0
上海盟疆工业自动化设备有限公司在经营活动中精益求精,具备如下业务优势:
上海盟疆工业自动化设备有限公司*销售西门子PLC,200,300,400,1200,西门子PLC附件,西门子电机,西门子人机界面,西门子变频器,西门子数控伺服,西门子总线电缆现货供应,咨询系列产品,折扣低,货期准时,并且备有大量库存. 长期有效
西门子数控伺服系统:802C S、802D SL、810D DE、820D SL、840C CE、840D DE、840D SL、840Di SL、S120数 控 系 统、数 控 伺 服 驱 动 模 块、控制 模 块、电 源模 块、备 品 备 件 等。
本公司产品质量按西门子原厂质量标准,产品质保一年,按西门子原厂包装标准,西门子原装 原装产品,按厂家执行标准,需方收到货后七日内可提出异议!!!
我们卖的不是价格。卖的是诚信卖的是品质
工控产品的更新换代是必然的,尤其近几年随着信息技术和电子产业的迅猛发展,工控业的发展变化可以用日新月异来形容;作为一名工控行业的工程师,面临这么快的发展和产品升级速度,压力也增大很多,我们公司周期长的基建项目,可能等做下一个项目时用到的产品已经升级了。
记得2000年前后,我们选型、设计、调试用的工控产品,可以连续几年不用重新选型,现在就不同了,工作中会频繁遇到选用新产品、新型号的事,大大增加了我们*次使用新产品的经历。
2014年*次在项目中使用6RA80的经历颇多,也是我近些年众多*次用新产品中印象深刻的一次,从集团和公司层面来说,国外项目是不容许出任何问题的,另外,*次选用西门子新的6RA80直流调速器在等离子行业中的应用,本身也存在一定的风险,当时感到压力很大。
首先调试的是S7200和6RA80的自由口通讯,大家会说6RA80了还用USS,岂不是白白浪费了高性能的PROFINET和PROFIBUS功能!确实如此,200PLC和6RA80的通讯只能用USS,200CPU程序中未使用现成的USS库指令,我想通过自由口发送和接收USS报文,达到USS通讯的目的,使用发送和接收指令,可以自己组态PZD,PKW的数据内容和通讯字长,另外,选用S7 200/S7 400还是选用DCS直接通讯,方案设计还要经过业主和设计院同意,其中不乏业主等原因。
利用200PLC的XMT、RCV指令编写通讯程序,按照USS报文格式组织发给6RA80的报文、做BCC效验,CPU处理接收的报文、做BCC效验,这部分工作还算顺利。接下来设置6RA80的通讯参数、接线、进行通讯调试时,整整调试了两天都没正常,其间电话咨询技术支持的工程师,把我的问题和现场接线情况、参数设置情况、PLC收发报文的格式等和工程师一一做了详尽的交流,在此对技术工程师再次表示感谢!
在下载了《SINAMICS_DCM_communicate_with_S7_200_by_USS》手册,详细地看了几遍,接线、设置6RA80通讯参数、200PLC通讯程序都和手册*,为啥就是无法正常通讯呢?接下来就是在现场折腾、接线无非就两根,颠倒一下非常容易;接下来频繁修改6RA80与通讯相关的参数,按手册的要求设置不好使,如下图:
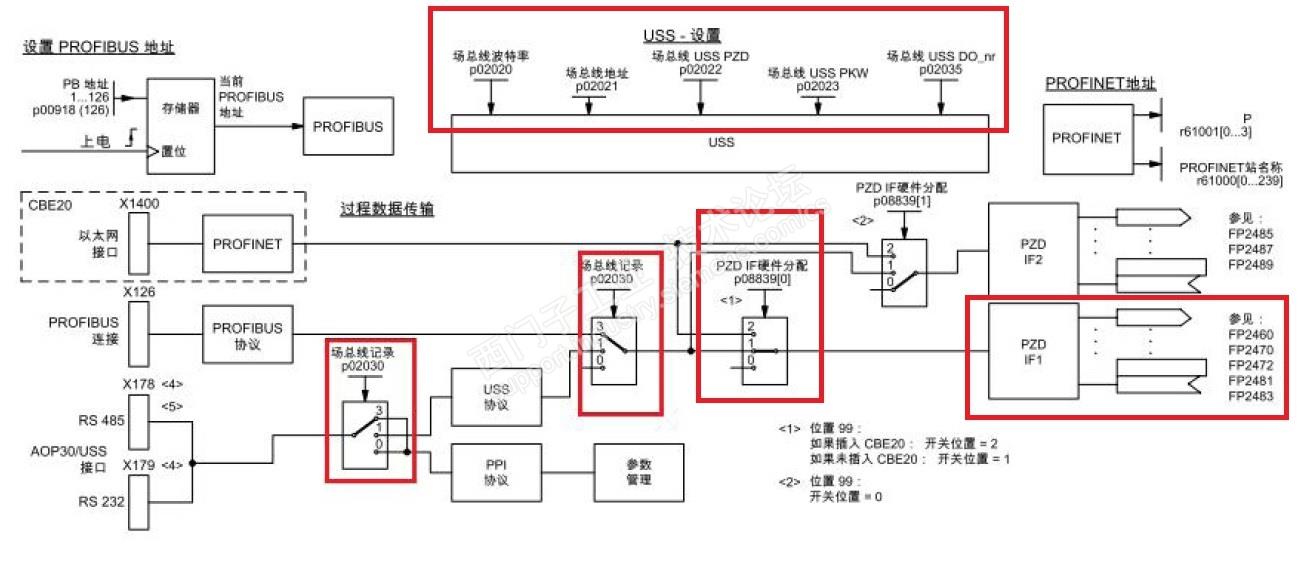
几经折腾,终于找到问题,是参数P8839的原因:该参数出厂默认根据CBE20通讯卡自动选择通讯接口1F1/1F2:如果没有插入该通讯板,则内部通讯接口 (PROFIBUS/USS) 通过 IF1 通讯;如果插入了 CBE20,则通过 IF1 进行 PROFINET CBE20 通讯,通过 IF2 进行 PROFIBUS/USS 通讯,原因是我调速器上配置了CBE20,错误的认为使用IF1接口与USS之间进行通讯,其实是使用的1F2接口。
这个故事说明了我自身存在的几个问题:
一是面对新产品、自己*次使用时担心出现其他问题,不敢大胆尝试,过于受手册约束;
二是新产品的手册和调试说明,尤其是中文版的资料,也是在逐步完善中,有些特殊功能可能描写的不是特别详尽,这时候需要我们自己反复查找产品手册,必要时下载英文版的手册作对照;
三是需要拓宽思路,在明确手册上描述的功能的基础上多做试验。
11月末东北已经正式进入冬季,天气渐渐变冷,室内的温度跟着室外温度慢慢的降了下来。每年都有暖气,室内不见得有多冷,今年就感觉特别的冷。虽然今年夏天办公室增加了一台空调,可是冬天到了,空调制热的功能却没有夏天制冷的效果那么好。在有暖气的地方待过的人都知道,要放放气暖气就热了,今年无论怎么放,暖气都是那样。于是就想到了换热系统是不是有问题了,进到控制室差的没吓死我,原来我们单位的换热系统这么”、大气、上档次“。



看了一下,一个变频器简单的恒压供给系统,变频器还是一个国产的。压力表一直没起来,可是泵还时断时续的转,莫非这么一个简单的东西还有别的地方影响?查吧,也没有图纸,我从来没见过做的这么"优秀"的布线,真是给我震住了。找了一圈,使能信号一直有,泵停的时候也有。那就捋动力回路吧,捋到接触器下边时,发现了上图中的下一排的东西,判断应该是热保吧,没有铭牌,看着上边有调节整定值的地方,不会是整定值不够吧,运行了好几年了整定值不能不够啊,看看电机铭牌:

果然啊,整定值设置在2.5,整定值调大后问题解决。
没见过这种热保,还具有自动复位的功能,长见识啊!
1.1 基本概念
插补的概念源于数控机床。在数控机床中,刀具不能严格地按照要求加工的曲线(直线)运动,只能用折线轨迹逼近所要加工的曲线。机床数控系统依照一定方法确定刀具运动轨迹的过程,叫做插补。也可以说,已知曲线上的某些数据,按照某种算法计算已知点之间的中间点的方法,或者称为“数据点的密化”。插补的动作过程:在每个插补周期(极短时间,一般为毫秒级)内,根据指令、进给速度计算出一个微小直线段的数据,刀具沿着微小直线段运动,经过若干个插补周期后,刀具从起点运动到终点,完成轮廓的加工。
路径运动初来自于机器人和CNC领域,用机器人编程语言或G-Code编程。它是指在多维空间中,通过一组轴的协作动作,各轴之间无主从之分,它们按照设定的动态响应特性,实现路径对象从起点到终点的的路径轨迹运动。
路径插补产生路径的运行轨迹,计算插补周期内的路径插补点,并通过机械运动系统转换获得对应插补周期内插补点的各路径轴设定值。
隶属于机械运动系统的单独轴在S7 technology中被为路径轴,路径轴通过路径对象执行路径运动。参考图1 路径轴与路径对象。
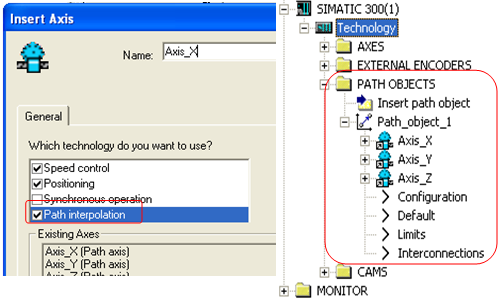
图1 路径轴与路径对象
1.2 S7-Technology 路径功能特点
S7-Technology 路径插补功能概述:
> 从S7-Technology V4.2开始
> 允许进行3轴插补操作
> 路径插补可以通过直线、圆弧、多项式表示实现
> Move Path命令可以组成连续运动
> 支持多种机械运动学模型
> 可以与外部位置值同步,实现传送带跟踪功能
S7-Technology 路径插补的技术特点:
> 所有的路径轴都相互同步移动
> 所有的路径轴都同时到达目标位置
> 路径轨迹的移动,将会始终是以一个固定的合成速度进行 (如果动态
特性限制没有被超越)
> 低速度性能的轴,决定了整个轨迹的高动态特性
路径差补可以执行多3轴之间的2D或者3D的线性、圆弧或者多项式插补,路径差补工艺对象(TO) ,适用于机械运动学控制范畴,一个共同的系统中,可以存在多个机械运动学控制结构。同步于路径轴的“同步轴”,仍然可以实现同步控制,例如,旋转,凸轮开关,测量功能。通过图形化编辑器,可以简便地设置机械运动学控制系统的参数;通过动态特性轮廓窗口,可以轻松定义路径的动态特性;通过轨迹点表格,可以轻松定义路径差补,计划目的地路径。另外还可以定义保护防撞区域和实现传送带位置的精确跟踪。
1.3 机械运动系统的选择
T-CPU 所实现运动学,等同于人们过去所熟悉机械运动学。可以将它们分为如下两种不同的类型。参考图2 在 T-CPU 中集成的机械运动学。
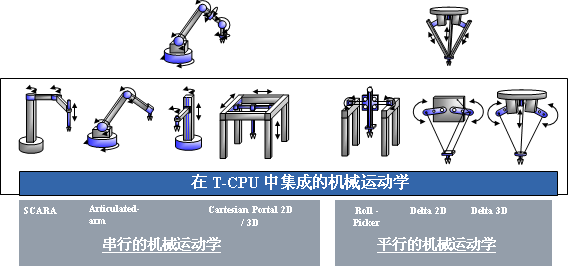
图2 在 T-CPU 中集成的机械运动学
不同的机械运动系统可以实现TCP (Tool Center Point,工具中心点或机械运动端点)相同的路径运动功能。尽管在某些情况下,不同的机械运动系统可实现相同的路径运动,但是,如果机械运动系统选择不合理,将有可能无法完成的路径功能。所以,必须根据实际的工艺需求选择合适的机械运动系统,并在工厂布局中考虑该机构的的合理安装位置。参考图3 不同机械系统的转化。
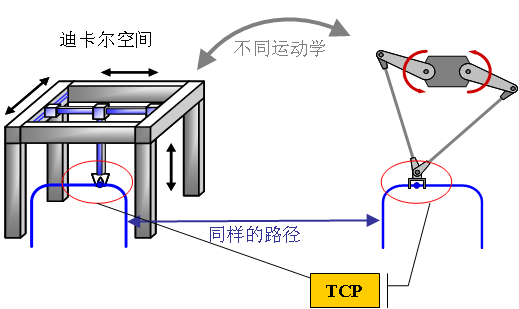
图3 不同机械系统的转化
2 路径插补的实现方法
2.1 运动学模型简介
常用的运动学模型请参考图 4 运动学模型。
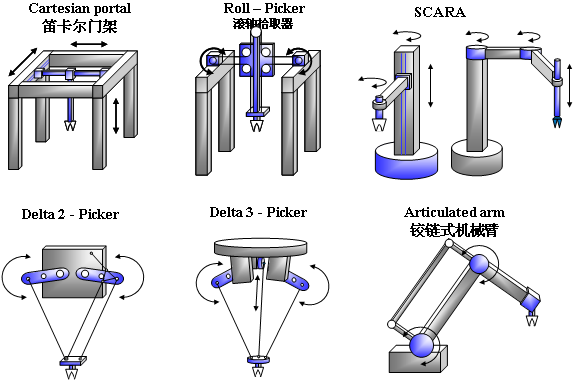
图 4 运动学模型
下面介绍一些常用的运动学模型。直角坐标机器人 (英文名:Cartesian coordinate robot),大型的直角坐标机器人也称桁架机器人或龙门式机器人,由多个运动自由度建成空间直角关系的、多用途的操作机器。工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。因末端操作工具的不同,直角坐标机器人可以非常方便的用作各种自动化设备,完成如焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂等一系列工作。参考图5 直角坐标机器人。
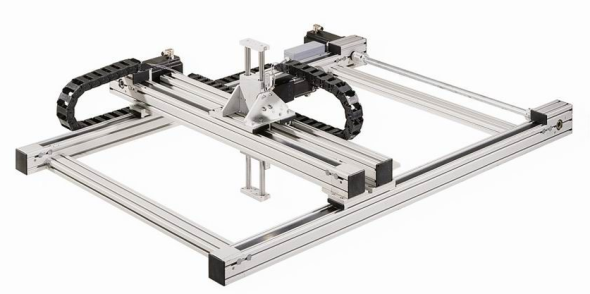
图5 直角坐标机器人
SCARA 机器人(Selective Compliance Assembly Robot Arm)是一种圆柱坐标型的特殊工业机器人。有3个旋转关节,其轴线相互平行,在平面内进行定位,另一个关节是移动关节,用于完成机械末端在垂直平面的运动。SCARA机器人在x,y方向上具有良好的顺从性、灵活性,而在Z轴方向具有良好的刚度,此特性特别适合于装配工作。SCARA机器人广泛应用于塑料工业、汽车工业、电子产品工业、药品工业和食品工业等领域。它的主要职能是搬取零件和装配工作。 参考图6 SCARA 机器人。
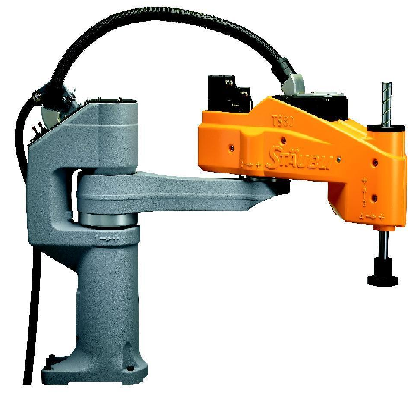
图6 SCARA 机器人
铰链型机械臂:有很高的自由度,可以多至5~6轴,适合于几乎任何轨迹或角度的工作,可以自由编程,完成全自动化的工作, 提高生产效率;可以代替很多不适合人力完成、有害身体健康的复杂工作,比如,汽车外壳点焊。参考图 7 铰链型机械臂。

图7铰链型机械臂
Delta 3D机器人:外形酷似一只蜘蛛,这种*的几何结构赋予了它们质量轻,强度大,轻便灵活,节省空间,高速,敏捷;适用于高速分拣。参考图8 Delta 3D机器人。

图8 Delta 3D机器人
S120驱动模块 6SL3120-1TE26-0AA0
S120驱动模块 6SL3120-1TE26-0AA1
S120驱动模块 6SL3120-1TE26-0AA3
S120驱动模块 6SL3120-1TE26-0AB0
S120驱动模块 6SL3120-1TE24-5AA0
S120驱动模块 6SL3120-1TE24-5AA1
S120驱动模块 6SL3120-1TE24-5AA3
S120驱动模块 6SL3120-1TE24-5AB0
S120驱动模块 6SL3120-1TE23-0AA0
S120驱动模块 6SL3120-1TE23-0AA1
S120驱动模块 6SL3120-1TE23-0AA3
S120驱动模块 6SL3120-1TE23-0AB0
S120驱动模块 6SL3120-1TE21-8AA0
S120驱动模块 6SL3120-1TE21-8AA1
S120驱动模块 6SL3120-1TE21-8AA3
S120驱动模块 6SL3120-1TE21-8AA4
S120驱动模块 6SL3120-1TE21-8AB0
S120驱动模块 6SL3120-1TE21-0AA0
S120驱动模块 6SL3120-1TE21-0AA1
S120驱动模块 6SL3120-1TE21-0AA3
S120驱动模块 6SL3120-1TE21-0AA4
S120驱动模块 6SL3120-1TE21-0AB0
S120驱动模块 6SL3120-1TE15-0AA0
S120驱动模块 6SL3120-1TE15-0AA3
S120驱动模块 6SL3120-1TE15-0AA4
S120驱动模块 6SL3120-1TE15-0AB0
S120驱动模块 6SL3120-1TE13-0AA0
S120驱动模块 6SL3120-1TE13-0AA3
S120驱动模块 6SL3120-1TE13-0AA4
S120驱动模块 6SL3120-1TE13-0AB0
S120驱动模块 6SL3120-2TE21-8AA0
S120驱动模块 6SL3120-2TE21-8AA3
S120驱动模块 6SL3120-2TE21-8AB0
S120驱动模块 6SL3120-2TE21-0AA0
S120驱动模块 6SL3120-2TE21-0AA3
S120驱动模块 6SL3120-2TE21-0AA4
S120驱动模块 6SL3120-2TE21-0AB0
S120驱动模块 6SL3120-2TE15-0AA0
S120驱动模块 6SL3120-2TE15-0AA3
S120驱动模块 6SL3120-2TE15-0AA4
S120驱动模块 6SL3120-2TE15-0AB0
S120驱动模块 6SL3120-2TE13-0AA0
S120驱动模块 6SL3120-2TE13-0AA3
S120驱动模块 6SL3120-2TE13-0AA4
S120驱动模块 6SL3120-2TE13-0AB0
S120控制单元 6SL3040-0MA00-0AA0
S120控制单元 6SL3040-0MA00-0AA1
S120控制单元 6SL3040-1MA00-0AA0
S120控制单元 6SL3040-1MA01-0AA0
S120控制单元 6SL3040-0LA00-0AA0
S120控制单元 6SL3040-0LA00-0AA1
S120控制单元 6SL3040-0LA01-0AA0
S120控制单元 6SL3040-0LA01-0AA1
S120控制单元 6SL3040-0JA00-0AA0

 化工仪器网
化工仪器网