 您好, 欢迎来到化工仪器网
您好, 欢迎来到化工仪器网










6ES7318-3EL01-0AB0
SIMATIC S7-300 CPU 319-3 PN/DP, 中央处理器,带 2MB 内存, 1 个 MPI/DP 12MBit/s 接口, 2个 DP-Master/Slave 接口, 3个 以太网 PROFINET 接口, 带双端口交换机, 需要微型存储卡
 |
| 参考价 | ¥11 |
| 订货量 | 1 |
更新时间:2021-11-23 10:05:54浏览次数:362
联系我们时请说明是化工仪器网上看到的信息,谢谢!
 |
 |
 |
 |
 |
湖南嘉普云自动化设备有限公司
该系统结构可以实现:
A. 控制器(PC)冗余;
B. Profibus总线系统冗余(包括:通讯接口,总线接头,总线电缆等)
C. IM153-2冗余
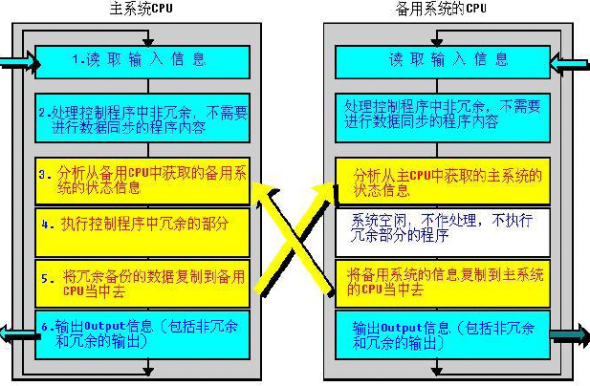
软冗余的基本原理:
本文的实验中所使用的实验设备:
西门子工控机Simatic PC840 V2 配置:
A. 计算机名:CHN840
B. WinXP SP2
C. WinAC RTX 2008 SP1
D. Simatic Net 2008
E. Step7 5.4 SP4
F. 软冗余软件包 V1.2
G. CP5611
H. 板载以太网卡
兼容PC配置 :
A. 计算机名:chnd
B. WinXP SP2
C. WinAC RTX 2008 SP1
D. Simatic Net 2008
E. 板载以太网卡
F. CP5613
ET200M从站:
A. 6ES7-153-2BA02-0XB0
B. BM IM153/IM153 (6ES7-195-7HD10-0XA0)
C. BM 2X40(6ES7-195-7HB00-0XA0)
D. 8DI/DO SM374 (6ES7-374-2XH01-0AA0)
关于软冗余原理和ET200M更多信息请参考:下载中心A0039 文档《软冗余的原理、调试和例程》,不再复述,本文档只关注用WinAC RTX实现软冗余的过程。
二.组态步骤:
1. 建立项目
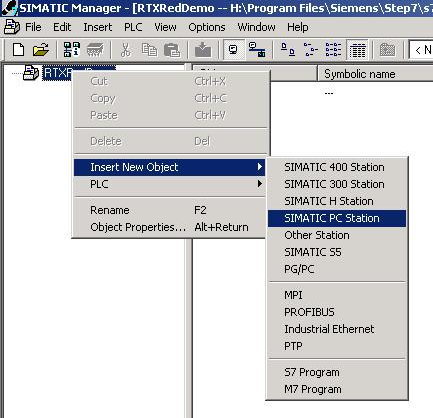
使用PC840 为编程设备,打开Simatic Manager,插入两个PC station,分别是CHN840 和chnd,并在组态计算机上设置“PG/PC interface”, S7ONLINE(STEP7)指向“PC internal(local)”。
2. 硬件组态
分别组态两个站的硬件配置:
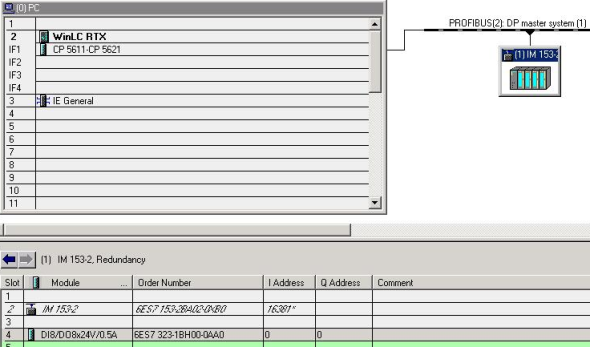
从硬件目录中分别找到“SIMATIC PC Station”->“Controller”->“ WinLC RTX”->“6ES7 611-4SB00-0YB7”->“V4.4” “V4.4”目录下找到“CP5611/CP5612”和 “CP Industrial Ethernet”->“IE General”,插入PC机架,如下图:
注:V4.4版本的WinLC RTX需要单独安装
CP5611地址为2,为其添加主站系统,并插入ET200M站(6ES7-153-2BA02-0XB0)和IO模块。
两个PC站做相似的硬件配置,此例中:
两个PC站的Profibus站址都为2,ET200M站的站址为5;
在两个PC站的硬件组态中该ET200M站都要存在,并且组态参数相同;
两个PC站的IE General的IP地址分别为192.168.10.222和192.168.10.12,并将它们接入相同的子网(Ethernet1)。
3. 建立连接
进入 NetPro, 为两个PC Station建立S7 连接:
右键点击选中其中一个站的WinLC RTX,在弹出菜单中选择“Insert New Connection”

在弹出对话框中选择通讯伙伴,并选择连接类型为:“S7 connection”。
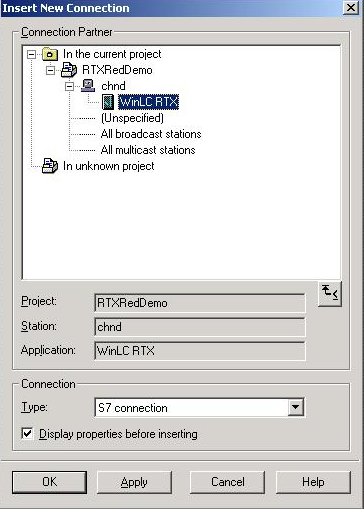 西门子6ES73183EL010AB0
西门子6ES73183EL010AB0
点击OK确认。弹出S7连接属性对话框,确认连接接口和 Local ID号。该ID号在程序中会使用到。
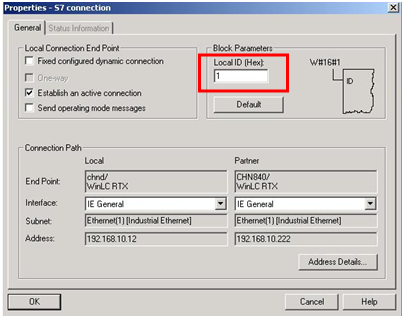
点击OK确认,退出。
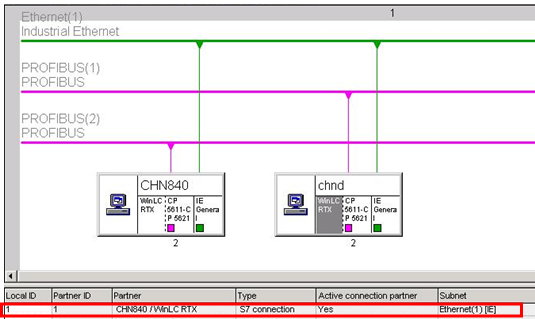
保存编译。通过菜单View -> With DP-Slaves/IO Devices,可以查看系统的网络结构图:
图6
| 参数 | 类型 | 格式 | 单位 | 意义 |
| Input | IN | REAL | mm or mm/s | 欲转换的位移或速度 |
| Pulses | IN | DINT | Pulse /revol. | 电机转一圈所需要的脉冲数 |
| E_Units | IN | REAL | mm /revol. | 电机转一圈所产生的位移 |
| Output | OUT | DINT | Pulse or pulse/s | 转换后的脉冲数或脉冲频率 |
表6
下面是该功能块的计算公式:

2.4.3 Scale_ Pulse_EU
该块用于将一个脉冲量转化为一个位置量,因此它可用于将一段脉冲数转化为位移,或将一个脉冲频率转化为速度。功能块如图7,功能描述见表7。

图7
| 参数 | 类型 | 格式 | 单位 | 意义 |
| Input | IN | REAL | Pulse or pulse/s | 欲转换的脉冲数或脉冲频率 |
| Pulses | IN | DINT | Pulse /revol. | 电机转一圈所需要的脉冲数 |
| E_Units | IN | REAL | mm /revol. | 电机转一圈所产生的位移 |
| Output | OUT | DINT | mm or mm/s | 转换后的位移或速度 |
表7
下面是该功能块的计算公式:

2.4.4 Q0_x_Home
功能块如图8,功能描述见表8。

图8
| 参数 | 类型 | 格式 | 单位 | 意义 |
| EXECUTE | IN | BOOL | 寻找参考点的执行位 | |
| Position | IN | DINT | Pulse | 参考点的位移 |
| Start_Dir | IN | BOOL | 寻找参考点的起始方向 | |
| (0=反向,1=正向) | ||||
| Done | OUT | BOOL | 完成位(1=完成) | |
| Error | OUT | BOOL | 故障位(1=故障) |
表8
该功能块用于寻找参考点,在寻找过程的起始,电机首先以 Start_Dir 的方向,Homing_Fast_Spd 的速度开始寻找;在碰到limit switch (“Fwd_Limit” or “Rev_Limit”)后,减速至停止,然后开始相反方向的寻找;当碰到参考点开关(input I0.0; with
Q0_1_Home: I0.1)的上升沿时,开始减速到 “Homing_Slow_Spd”。如果此时的方向与 “Final_Dir” 相同,则在碰到参考点开关下降沿时停止运动,并且将计数器HC0的计数值设为 “Position” 中所定义的值。
如果当前方向与 “Final_Dir” 不同,则必然要改变运动方向,这样就可以保证参考点始终在参考点开关的同一侧(具体是那一侧取决于 “Final_Dir”)。
西门子6ES73183EL010AB0