 |
上海壹侨国际贸易有限公司
主营产品: FILA,DEBOLD,ESTA,baumer,bernstein,bucher,PILZ,camozzi,schmalz |

7
联系电话
|
上海壹侨国际贸易有限公司
主营产品: FILA,DEBOLD,ESTA,baumer,bernstein,bucher,PILZ,camozzi,schmalz |
联系电话
| 参考价 | 面议 |
更新时间:2018-12-07 09:56:37浏览次数:421
联系我们时请说明是化工仪器网上看到的信息,谢谢!
| 产地类别 | 进口 |
|---|
GROSCHOPP Nr 8349895 WK1514304
GROSCHOPP Nr 8349895 WK1514304
美国GROSCHOPP电机、交流电机、GROSCHOPP无刷直流电动机、GROSCHOPP减速机、GROSCHOPP齿轮减速机、GROSCHOPP行星齿轮减速机、GROSCHOPP直角行星减速机、GROSCHOPP泵、GROSCHOPP汽车用品
GROSCHOPP Nr:5844595 WK 1224404 -MOT OKM87-60 IP54
GROSCHOPP 三相电机 IGL 80-60 NV 8669712
GROSCHOPP NR:7749962 WK 1224404 -MOT OKM 87-60 IP54
GROSCHOPP NR51205568 WK1195502 160V/125W/1A 400R/MIN
GROSCHOPP NR51205568 WK1195502 160V/125W /1A 400R/MIN
GROSCHOPP NR5120568 WK1380009 3-GEN TDG 60-10 Y11V-15V PRO 1000R/MIN
GROSCHOPP TYP SC 80 传动比:1:25
GROSCHOPP NR 8572345 WK1675201 3-MOT ED1 100-60 IP43 Y 73-150V
GROSCHOPP NP8552229 WK1675201 3-MOT ED1 100-60 IP43 Y 73-150V
GROSCHOPP WK 1694701 50Hz 270W Nr:8356957
GROSCHOPP WK 1778001 50-60Hz 270W Nr:8433109
GROSCHOPP 减速器 TYP:VE31-K-R-31
GROSCHOPP WK 1779509 Nr:8383146 90-80Nr IP:54 560W 3000min-1
GROSCHOPP NR:5721697,WK:1028214 MOT KM 80-40 IP23 65W 4000MIN-1
GROSCHOPP EM 87-60
GROSCHOPP WK1083102 190V 1.32A 200W
GROSCHOPP NR:7829792 WK1018004
GROSCHOPP NL:8239372 WK1054702 3000M/R MOLpm 48-25 IP54 24V 0.8A 12W
GROSCHOPP Nr.7794089 WK 1095702 IP44
GROSCHOPP GPFX052143 P0003 DC220-250V 1.43A 660W/470W Nr:8770379
GROSCHOPP KM87-60 NR:8135824 WK1155432
GROSCHOPP 1543091(1SET=2PCS)NR:8135824 WK1155432
GROSCHOPP 6746167 WK 16.38902 M01 IP00 EM78-45 220V 1.6A 电机
GROSCHOPP Z8 Nr.8280554 WK1779101
GROSCHOPP Nr 8349895 WK1514304
GROSCHOPP Nr.5020399 WK 1137204 180V Mot KM 120-65 IP44 1.7A
GROSCHOPP NR.8494915 WK 1675201 3-Mot ED1 100-60 IP43
GROSCHOPP NR:8984510 WK1641904 MOT EM94-80 IP00
GROSCHOPP WK1113102 NO;8439881 MOT PM1 85-40 IP44
GROSCHOPP KE 70-20-MC 220-250V N/06
GROSCHOPP PM8018/180VDC/225W/1.48A/2600 RPM
GROSCHOPP type ED170-30 Y200V 250HZ 14500U 80W WK1617601
GROSCHOPP NR:6633477 WK 1180904 MOT EM 120-80 IP00
GROSCHOPP MOT:PM1 72-35 IP 44 NR:3288682
GROSCHOPP 8662746 WK5000102 Nr;529426
GROSCHOPP GPFX 052143 DC220V/DC110V 660W NR:9091384 WK5006904 220-250VD
GROSCHOPP EM87-60 IPOO 220-250V 8.5A NR:8801808 WK1637402 0-60HZ
GROSCHOPP WK1440202 PM1 60-30 1944 Nr.5083493 160V 32W 4000min-1
GROSCHOPP TYP SG20 Md max 200Ncm min 24Ncm
GROSCHOPP Nr;8169209, WK00867
GROSCHOPP WK;11185 MOT PM1 60-30 17W 2000MIN I SOL.K1.B
GROSCHOPP VE31-K-Y-31 MAX:900NCM
1、特点
感应子式与传统的反应式相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。 感应子式某种程度上可以看作是低速同步的电机。一个四相电机可以作四相运行,也可以作二相运行。(必须采用双极电压驱动),而反应式电机则不能如此。例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)*可以采用二相八拍运行方式.不难发现其条件为C=,D=. 一个二相电机的内部绕组与四相电机**,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用。
2、分类
感应子式电机以相数可分为:二相电机、三相电机、四相电机、五相电机等。以机座号(电机外径)可分为:42BYG(BYG为感应子式步进电机代号)、57BYG、86BYG、110BYG、(国际标准),而像70BYG、90BYG、130BYG等均为国内标准。
3、步进电机的静态指标术语
(1)相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。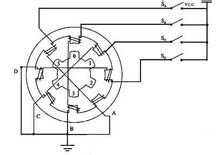
(2)拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
(3)步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
(4)定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)
(5)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积的标准,与驱动电压及驱动电源等无关。 虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过分采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。
4、动态指标及术语:
(1)步距角精度: 步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
(2)失步: 电机运转时运转的步数,不等于理论上的步数。称之为失步。
(3)失调角: 转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
(4)最大空载起动频率: 电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
(5)最大空载的运行频率: 电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
(6)运行矩频特性: 电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。如下图所示: 其它特性还有惯频特性、起动频率特性等。 电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。 如下图所示: 其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。 要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机。
(7)电机的共振点:步进电机均有固定的共振区域,二、四相感应子式的共振区一般在180-250pps之间(步距角1.8度)或在400pps左右(步距角为0.9度),电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然,为使电机输出电矩大,不失步和整个系统的噪音降低,一般工作点均应偏移共振区较多。
(8)电机正反转控制: 当电机绕组通电时序为AB-BC-CD-DA或()时为正转,通电时序为DA-CD-BC-AB或()时为反转。
MULTI-CONTACT 18.0111
MULTI-CONTACT 18.0121 MGS1VB-R13-IS
Multi-Contact Essen GmbH ME1-6+PE-SP2/0.5-1.5
Multifunctions thermoresistence Pt100 cl. A
Murr 8000-88550-0000000
Murr 7000-08481-0000000
Murr 23000
Murr 23050
Murr 23118
Murr 23149
Murr 336818
Murr 4000-68000-0160000
Murr 4000-68000-0910000
Murr 55345
Murr 56424
Murr 5665100
Murr 67950
Murr 7000-08041-2200500
Murr 7000-08061-2311000
Murr 7000-08081-2200150
Murr 7000-08401-0000000
Murr 7000-12221-6340500
Murr 7000-12381-6330150
Murr 7000-12421-2340300
Murr 7000-12421-2340500
Murr 7000-12491-0000000
Murr 7000-12491-0000000
Murr 7000-12781-0000000
Murr 7000-13101-3480500
Murr 7000-13321-0000000
Murr 7000-13361-0000000
Murr 7000-14005-0000000
Murr 7000-18021-2362500
Murr 7000-18021-6361000
Murr 7000-18141-2281000
Murr 7000-40021-2340100
Murr 7000-40121-2340200
HAMMELMANN GmbH 04.00730.0337
HAMMELMANN GmbH 00.05893.0022
HAMMELMANN GmbH 01.00705.0025
HAMMELMANN GmbH 01.02123.0134
HAMMELMANN GmbH 01.03465.1110
HAMMELMANN GmbH 01.03465.1053
HAMMELMANN GmbH 00.02110.0247
HAMMELMANN GmbH 01.00705.00258(Position2 in ANGEBOT 1123153)
HAINBUCH GMBH SK42 BZIG Φ28
HAINBUCH GMBH SK 65 BZIG Φ51
HAINBUCH GMBH SK100 BZR 30.0
HAINBUCH GMBH Spannkopf SK 65 BZIG Spann 24.50 mm rd Zchn-Nr.SW.SK65BZIG
HAINBUCH GMBH 2702/0004
HAINBUCH GMBH SK42BZIG D18.5
HAINBUCH GMBH SK100 BZR 20.0
HAINBUCH GMBH SK 100 BZ 24,00 mm skt
HAINBUCH GMBH SK42 BZIG Φ20
HAINBUCH GMBH Spannkopf SK 65 BZIG,Spanndurchmesser 24,50 mm rd,Zchn-Nr:SW
HAINBUCH GMBH SK42 BZIG Φ30
HAINBUCH GMBH SK52BZIG D32.06
HAINBUCH GMBH SK 100 BZ 22,00 mm skt
HAINBUCH GMBH Spannkopf SK 65 BZIG,Spanndurchmesser 40,50 mm rd,Zchn-Nr:SK
HAINBUCH GMBH SK42 BZIG Φ21.5
HAINBUCH GMBH SK52BZIR D40
HAINBUCH GMBH 2801/0001
HAINBUCH GMBH SK42BZIG D26
HAINBUCH GMBH SK 42 BZIG Φ21.93
HAINBUCH GMBH sk65bzigr24,5
HAINBUCH GMBH SK52 BZIG Φ23.5
HAINBUCH GMBH 2702/0005
HAINBUCH GMBH mq52
HAINBUCH GMBH SK42 BZIG Φ24
HAINBUCH GMBH SK 65 BZIG Φ32.30
HAINBUCH GMBH SK 65 BZIG Φ23
HAINBUCH GMBH SK42 BZIG Φ26D-191/1.25X10.00X20.00
Gutekunst + Co.KG VD-196
Gutekunst + Co.KG D-243B
Gutekunst + Co.KG D-188
Gutekunst + Co.KG D-159
Gutekunst + Co.KG D 207E
Gutekunst + Co.KG D-078A,0.5*4*20*9.5
Gutekunst + Co.KG D-090AE
Gutekunst + Co.KG D-263M-10/2.20X13.20X240.00
Gutekunst + Co.KG D-219
Gutekunst + Co.KG D-234N/2.00X28.00X115.00
Gutekunst + Co.KG D-049
GUTEKUNST D-108
GUTEKUNST D-140
GUTEKUNST VD-056B
GUTEKUNST D207 D-07
GUTEKUNST D-110A
GUTEKUNST D-376
GUTEKUNST D142
GUTEKUNST D-114
GUTEKUNST D-180G
GUTEKUNST D-200E
GUTEKUNST D-090
GUTEKUNST D-165E
GUTEKUNST D-085E
GUTEKUNST DB 113691
GUTEKUNST D-376
GUTEKUNST Z-110I
GUTEKUNST D-63B
GUTEKUNST D080
GUTEKUNST D-110
GUTEKUNST D-313K
GUTEKUNST D-127 Lang
GUTEKUNST D-142AD
GUTEKUNST D-232D
GUTEKUNST D-207 D-04
GUTEKUNST D-117
GUTEKUNST D-176
GUTEKUNST D-207KT
GUTEKUNST D-085D
GUTEKUNST D-190
GUTEKUNST D-201
GUTEKUNST D105
GUTEKUNST Z-072F
GUTEKUNST D-234
GUTEKUNST Z-075
GUTEKUNST D-310
GUTEKUNST D-166N
GUTEKUNST D-085H
GUTEKUNST D207D
GUNTHER WG-MODC24
GUNTHER WG-MODC24
Guntermann & Drunck GmbH A1220001
Guntermann & Drunck GmbH TradeSwitch2-USB
Guntermann & Drunck GmbH CATVision-CON Art.Nr: A112 0003
Guntermann & Drunck GmbH A1110003 CATVision-CPU
Guntermann & Drunck GmbH A112 0003
Guntermann & Drunck GmbH A111 0003
Guntermann & Drunck GmbH CATVision-MC2-CON
Guntermann & Drunck GmbH CATvision-CPU Send extender
Guntermann & Drunck GmbH CATVision-AR-CPU-RM
Guntermann & Drunck GmbH CATvision-CPU Receiver Extender
Guntermann & Drunck GmbH DVIMUX2-DL-USB-RM
Haug03.8600.000;Ionisationsstab PS axial
NETTER GMBH HG 10 N + DRV 气动振荡器附件
NETTER GMBH Bausatz ST f??r PKL 740 气动振荡器附件
NETTER GMBH PKL 740/4 气动振荡器
KTR ROTEX GS 48P 98SHA 6.0-42/6.0-42 联轴器
schmalenberger SM50-20/2-5.5 泵
leine&linde RSI 595 PN:896537-01 编码器
MW Hydraulik GmbH Typ HMS 2,6 Nach SK 251.1.1 液压马达
FKB 599-001-003 灯盖
FKB 591-055-002 灯
FSG PW620-23d ID: 1585Z01-000.001 电位计
Hengstler GEBER RI32-O/ 1024ER.14KB ID:0527113 编码器
Knick P27000H1 隔离放大器
Klaschka AIN1/410ca-1.60 -115/230VAC 模块
Filter- und Trocknertechnik GmbH 6.3671.0 滤芯
Filter- und Trocknertechnik GmbH 6.2003.0 滤芯
Knick P41100D1-0010 隔离器
Euchner STA3A-4141A024SEM4AS1 安全开关
HAINBUCH SK65BZIG clamping diameter=D29.60 depth=L13 Through Hole=D18 夹具
Datalogic CBL-1480-05CW 连接线
Datalogic C0405-USB-01 调试器
hydac EDS348-5-016-000+ZBE08-02 压力开关
hydac EDS348-5-250-000+ZBE08-02 压力开关
hydac EDS344-3-016-000+ZBE02+ZBM14 压力开关
Honsberg OMNI-F-008HK028S 流量计
AVS-Romer EGV-111-B96-3/4BP-00 电磁阀
Crane AMGD2E100F 阀
SCHUNK 0301430 MMSW 22-S-M8-PNP 磁性开关
Cryotherm 79403186 电磁阀
SCHISCHEK ExBox-Y/S / 090.5010 接线盒
JANITZA UMG96L, art no:52.14.001 数显表
JANITZA Type: UMG 96, Art.-Nr. 52.09.001 通用测量仪
ekd gelenkrohr GmbH PLP 220 /150 /250 x 1575 / 100 - K/K - "w+k" 4 Pz/2.te Tlg.; 柔性电缆槽
Mahle PI 71004 DN PS VST 3 滤芯
Phoenix Nr.2902856 模块
schmalz SBP-C 07 G1 NC AI VS-T 喷嘴
Micro Innovation XV-440-10TVB-1-10 触摸屏
heidenhain ROQ 425 ID: 586634-03 编码器
Metro M804A 探头
Honsberg MR-020GM010 流量开关
Honsberg RW-015HKS 液位开关
FSG AN-60-P/MH-3L/F/o/02 风速仪
Weinreich NPY-2051-0105 art 0401SP002 泵
HAUBER 640.16.000.0
HASKEL AAD-5
Hasco Z1227/1/16/24
Hasco Z98/19.3/2.4 71790
Hasco Z1227/16/24 296430
Hasco Z1229/1/16/24
Hasco Z1227/16/24 296430
Hasco Z807/13/18X1,5/S
Hasco Z1229/1/16/24
Hasco Z98/17.5/3
Hasco Z81/13/R1/4
Hasco Z98/19.3/2.4
Hasco Z1227/1/16/24
Hasco Z98/19.3/2.4
Hasco Z98/12/2
Hasco Z1229/1/16/24 296511
Hasco Z1227 /16/24
Hasco Z1229/1/16/24
Hasco Z98/21.3/2.4
Hasco Z1229/1/16/24
Hasco Z 742/14X 75X45
Hasco Z1229/1/16/24
Hasco Z1227 /16/24
Hasco Z1227/16/24
Hasco Z1227/1/16/24
Hasco Z1227/16/24
Hasco Z1229/1/16/24 296511
Hasco Z98/17.5/3 272663
HASBERG 150*0.05*5000
1、特点
感应子式与传统的反应式相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。 感应子式某种程度上可以看作是低速同步的电机。一个四相电机可以作四相运行,也可以作二相运行。(必须采用双极电压驱动),而反应式电机则不能如此。例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)*可以采用二相八拍运行方式.不难发现其条件为C=,D=. 一个二相电机的内部绕组与四相电机**,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用。
2、分类
感应子式电机以相数可分为:二相电机、三相电机、四相电机、五相电机等。以机座号(电机外径)可分为:42BYG(BYG为感应子式步进电机代号)、57BYG、86BYG、110BYG、(国际标准),而像70BYG、90BYG、130BYG等均为国内标准。
3、步进电机的静态指标术语
(1)相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
(2)拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
(3)步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
(4)定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)
(5)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积的标准,与驱动电压及驱动电源等无关。 虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过分采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。
4、动态指标及术语:
(1)步距角精度: 步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
(2)失步: 电机运转时运转的步数,不等于理论上的步数。称之为失步。
(3)失调角: 转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
(4)最大空载起动频率: 电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
(5)最大空载的运行频率: 电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
(6)运行矩频特性: 电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。如下图所示: 其它特性还有惯频特性、起动频率特性等。 电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。 如下图所示: 其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。 要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机。
(7)电机的共振点:步进电机均有固定的共振区域,二、四相感应子式的共振区一般在180-250pps之间(步距角1.8度)或在400pps左右(步距角为0.9度),电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然,为使电机输出电矩大,不失步和整个系统的噪音降低,一般工作点均应偏移共振区较多。
(8)电机正反转控制: 当电机绕组通电时序为AB-BC-CD-DA或()时为正转,通电时序为DA-CD-BC-AB或()时为反转。
1、特点
感应子式与传统的反应式相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。 感应子式某种程度上可以看作是低速同步的电机。一个四相电机可以作四相运行,也可以作二相运行。(必须采用双极电压驱动),而反应式电机则不能如此。例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)*可以采用二相八拍运行方式.不难发现其条件为C=,D=. 一个二相电机的内部绕组与四相电机**,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用。
2、分类
感应子式电机以相数可分为:二相电机、三相电机、四相电机、五相电机等。以机座号(电机外径)可分为:42BYG(BYG为感应子式步进电机代号)、57BYG、86BYG、110BYG、(国际标准),而像70BYG、90BYG、130BYG等均为国内标准。
3、步进电机的静态指标术语
(1)相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
(2)拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
(3)步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
(4)定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)
(5)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积的标准,与驱动电压及驱动电源等无关。 虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过分采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。
4、动态指标及术语:
(1)步距角精度: 步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
(2)失步: 电机运转时运转的步数,不等于理论上的步数。称之为失步。
(3)失调角: 转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
(4)最大空载起动频率: 电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
(5)最大空载的运行频率: 电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
(6)运行矩频特性: 电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。如下图所示: 其它特性还有惯频特性、起动频率特性等。 电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。 如下图所示: 其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。 要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机。
(7)电机的共振点:步进电机均有固定的共振区域,二、四相感应子式的共振区一般在180-250pps之间(步距角1.8度)或在400pps左右(步距角为0.9度),电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然,为使电机输出电矩大,不失步和整个系统的噪音降低,一般工作点均应偏移共振区较多。
(8)电机正反转控制: 当电机绕组通电时序为AB-BC-CD-DA或()时为正转,通电时序为DA-CD-BC-AB或()时为反转。
1、特点
感应子式与传统的反应式相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。 感应子式某种程度上可以看作是低速同步的电机。一个四相电机可以作四相运行,也可以作二相运行。(必须采用双极电压驱动),而反应式电机则不能如此。例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)*可以采用二相八拍运行方式.不难发现其条件为C=,D=. 一个二相电机的内部绕组与四相电机**,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用。
2、分类
感应子式电机以相数可分为:二相电机、三相电机、四相电机、五相电机等。以机座号(电机外径)可分为:42BYG(BYG为感应子式步进电机代号)、57BYG、86BYG、110BYG、(国际标准),而像70BYG、90BYG、130BYG等均为国内标准。
3、步进电机的静态指标术语
(1)相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
(2)拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
(3)步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
(4)定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)
(5)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积的标准,与驱动电压及驱动电源等无关。 虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过分采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。
4、动态指标及术语:
(1)步距角精度: 步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
(2)失步: 电机运转时运转的步数,不等于理论上的步数。称之为失步。
(3)失调角: 转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
(4)最大空载起动频率: 电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
(5)最大空载的运行频率: 电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
(6)运行矩频特性: 电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。如下图所示: 其它特性还有惯频特性、起动频率特性等。 电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。 如下图所示: 其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。 要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机。
(7)电机的共振点:步进电机均有固定的共振区域,二、四相感应子式的共振区一般在180-250pps之间(步距角1.8度)或在400pps左右(步距角为0.9度),电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然,为使电机输出电矩大,不失步和整个系统的噪音降低,一般工作点均应偏移共振区较多。
(8)电机正反转控制: 当电机绕组通电时序为AB-BC-CD-DA或()时为正转,通电时序为DA-CD-BC-AB或()时为反转。
1、特点
感应子式与传统的反应式相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。 感应子式某种程度上可以看作是低速同步的电机。一个四相电机可以作四相运行,也可以作二相运行。(必须采用双极电压驱动),而反应式电机则不能如此。例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)*可以采用二相八拍运行方式.不难发现其条件为C=,D=. 一个二相电机的内部绕组与四相电机**,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用。
2、分类
感应子式电机以相数可分为:二相电机、三相电机、四相电机、五相电机等。以机座号(电机外径)可分为:42BYG(BYG为感应子式步进电机代号)、57BYG、86BYG、110BYG、(国际标准),而像70BYG、90BYG、130BYG等均为国内标准。
3、步进电机的静态指标术语
(1)相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
(2)拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
(3)步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
(4)定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)
(5)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积的标准,与驱动电压及驱动电源等无关。 虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过分采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。
4、动态指标及术语:
(1)步距角精度: 步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
(2)失步: 电机运转时运转的步数,不等于理论上的步数。称之为失步。
(3)失调角: 转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
(4)最大空载起动频率: 电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
(5)最大空载的运行频率: 电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
(6)运行矩频特性: 电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。如下图所示: 其它特性还有惯频特性、起动频率特性等。 电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。 如下图所示: 其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。 要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机。
(7)电机的共振点:步进电机均有固定的共振区域,二、四相感应子式的共振区一般在180-250pps之间(步距角1.8度)或在400pps左右(步距角为0.9度),电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然,为使电机输出电矩大,不失步和整个系统的噪音降低,一般工作点均应偏移共振区较多。
(8)电机正反转控制: 当电机绕组通电时序为AB-BC-CD-DA或()时为正转,通电时序为DA-CD-BC-AB或()时为反转。
1、特点
感应子式与传统的反应式相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。 感应子式某种程度上可以看作是低速同步的电机。一个四相电机可以作四相运行,也可以作二相运行。(必须采用双极电压驱动),而反应式电机则不能如此。例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)*可以采用二相八拍运行方式.不难发现其条件为C=,D=. 一个二相电机的内部绕组与四相电机**,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用。
2、分类
感应子式电机以相数可分为:二相电机、三相电机、四相电机、五相电机等。以机座号(电机外径)可分为:42BYG(BYG为感应子式步进电机代号)、57BYG、86BYG、110BYG、(国际标准),而像70BYG、90BYG、130BYG等均为国内标准。
3、步进电机的静态指标术语
(1)相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
(2)拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
(3)步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
(4)定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)
(5)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积的标准,与驱动电压及驱动电源等无关。 虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过分采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。
4、动态指标及术语:
(1)步距角精度: 步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
(2)失步: 电机运转时运转的步数,不等于理论上的步数。称之为失步。
(3)失调角: 转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
(4)最大空载起动频率: 电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
(5)最大空载的运行频率: 电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
(6)运行矩频特性: 电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。如下图所示: 其它特性还有惯频特性、起动频率特性等。 电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。 如下图所示: 其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。 要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机。
(7)电机的共振点:步进电机均有固定的共振区域,二、四相感应子式的共振区一般在180-250pps之间(步距角1.8度)或在400pps左右(步距角为0.9度),电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然,为使电机输出电矩大,不失步和整个系统的噪音降低,一般工作点均应偏移共振区较多。
(8)电机正反转控制: 当电机绕组通电时序为AB-BC-CD-DA或()时为正转,通电时序为DA-CD-BC-AB或()时为反转。
1、特点
感应子式与传统的反应式相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。 感应子式某种程度上可以看作是低速同步的电机。一个四相电机可以作四相运行,也可以作二相运行。(必须采用双极电压驱动),而反应式电机则不能如此。例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)*可以采用二相八拍运行方式.不难发现其条件为C=,D=. 一个二相电机的内部绕组与四相电机**,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用。
2、分类
感应子式电机以相数可分为:二相电机、三相电机、四相电机、五相电机等。以机座号(电机外径)可分为:42BYG(BYG为感应子式步进电机代号)、57BYG、86BYG、110BYG、(国际标准),而像70BYG、90BYG、130BYG等均为国内标准。
3、步进电机的静态指标术语
(1)相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
(2)拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
(3)步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
(4)定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)
(5)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积的标准,与驱动电压及驱动电源等无关。 虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过分采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。
4、动态指标及术语:
(1)步距角精度: 步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
(2)失步: 电机运转时运转的步数,不等于理论上的步数。称之为失步。
(3)失调角: 转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
(4)最大空载起动频率: 电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
(5)最大空载的运行频率: 电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
(6)运行矩频特性: 电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。如下图所示: 其它特性还有惯频特性、起动频率特性等。 电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。 如下图所示: 其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。 要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机。
(7)电机的共振点:步进电机均有固定的共振区域,二、四相感应子式的共振区一般在180-250pps之间(步距角1.8度)或在400pps左右(步距角为0.9度),电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然,为使电机输出电矩大,不失步和整个系统的噪音降低,一般工作点均应偏移共振区较多。
(8)电机正反转控制: 当电机绕组通电时序为AB-BC-CD-DA或()时为正转,通电时序为DA-CD-BC-AB或()时为反转。
1、特点
感应子式与传统的反应式相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。 感应子式某种程度上可以看作是低速同步的电机。一个四相电机可以作四相运行,也可以作二相运行。(必须采用双极电压驱动),而反应式电机则不能如此。例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)*可以采用二相八拍运行方式.不难发现其条件为C=,D=. 一个二相电机的内部绕组与四相电机**,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用。
2、分类
感应子式电机以相数可分为:二相电机、三相电机、四相电机、五相电机等。以机座号(电机外径)可分为:42BYG(BYG为感应子式步进电机代号)、57BYG、86BYG、110BYG、(国际标准),而像70BYG、90BYG、130BYG等均为国内标准。
3、步进电机的静态指标术语
(1)相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
(2)拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
(3)步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
(4)定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)
(5)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积的标准,与驱动电压及驱动电源等无关。 虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过分采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。
4、动态指标及术语:
(1)步距角精度: 步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
(2)失步: 电机运转时运转的步数,不等于理论上的步数。称之为失步。
(3)失调角: 转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
(4)最大空载起动频率: 电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
(5)最大空载的运行频率: 电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
(6)运行矩频特性: 电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。如下图所示: 其它特性还有惯频特性、起动频率特性等。 电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。 如下图所示: 其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。 要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机。
(7)电机的共振点:步进电机均有固定的共振区域,二、四相感应子式的共振区一般在180-250pps之间(步距角1.8度)或在400pps左右(步距角为0.9度),电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然,为使电机输出电矩大,不失步和整个系统的噪音降低,一般工作点均应偏移共振区较多。
(8)电机正反转控制: 当电机绕组通电时序为AB-BC-CD-DA或()时为正转,通电时序为DA-CD-BC-AB或()时为反转。
1、特点
感应子式与传统的反应式相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。 感应子式某种程度上可以看作是低速同步的电机。一个四相电机可以作四相运行,也可以作二相运行。(必须采用双极电压驱动),而反应式电机则不能如此。例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)*可以采用二相八拍运行方式.不难发现其条件为C=,D=. 一个二相电机的内部绕组与四相电机**,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用。
2、分类
感应子式电机以相数可分为:二相电机、三相电机、四相电机、五相电机等。以机座号(电机外径)可分为:42BYG(BYG为感应子式步进电机代号)、57BYG、86BYG、110BYG、(国际标准),而像70BYG、90BYG、130BYG等均为国内标准。
3、步进电机的静态指标术语
(1)相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。
(2)拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即 A-AB-B-BC-C-CD-D-DA-A。
(3)步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度/(转子齿数*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。
(4)定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)
(5)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积的标准,与驱动电压及驱动电源等无关。 虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过分采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。
4、动态指标及术语:
(1)步距角精度: 步进电机每转过一个步距角的实际值与理论值的误差。用百分比表示:误差/步距角*100%。不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内。
(2)失步: 电机运转时运转的步数,不等于理论上的步数。称之为失步。
(3)失调角: 转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
(4)最大空载起动频率: 电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
(5)最大空载的运行频率: 电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
(6)运行矩频特性: 电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。如下图所示: 其它特性还有惯频特性、起动频率特性等。 电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。 如下图所示: 其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。 要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机。
(7)电机的共振点:步进电机均有固定的共振区域,二、四相感应子式的共振区一般在180-250pps之间(步距角1.8度)或在400pps左右(步距角为0.9度),电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然,为使电机输出电矩大,不失步和整个系统的噪音降低,一般工作点均应偏移共振区较多。
(8)电机正反转控制: 当电机绕组通电时序为AB-BC-CD-DA或()时为正转,通电时序为DA-CD-BC-AB或()时为反转。



